 EN
EN DE
DE ES
ES FR
FR IT
IT










Encoder rotativi
Con interfacce analogiche, digitali o incrementali in versione monogiro o multigiro
Guida dei Encoder rotativi
Indice
Che cos'è un encoder rotativo?

Gli encoder rilevano o specificano posizioni angolari e convertono queste informazioni in segnali elettrici. Sono sensori angolari che trasmettono il valore misurato senza contatto a un sistema elettronico. Questo li distingue dai potenziometri, che sono componenti passivi. Fondamentalmente, ogni encoder è costituito da una custodia, dall'elettronica con il sensore come cuore della misurazione e dal collegamento elettrico. A seconda della versione, il sensore può includere anche un albero con un cuscinetto per produrre meccanicamente la misura dell'angolo. Esistono molti termini correlati al termine encoder. Tuttavia, se l'angolo viene fornito come valore completo (cioè come valore assoluto) con un riferimento fisso a una posizione zero, l'encoder rotativo viene definito encoder assoluto. Se viene fornita solo la variazione dell'angolo, ossia il segnale di uscita fornisce solo informazioni relative, l'encoder è un encoder incrementale. Questa guida descrive solo le tecnologie senza contatto che utilizzano principi di misura magnetici o ottici.
Cosa significa "senza contatto" o "senza contatto"?
Senza contatto significa che la misura viene trasmessa all'elettronica senza contatto. Ad esempio, una parte rotante dell'applicazione è collegata all'albero dell'encoder e la misura viene ricevuta dall'elettronica. Tuttavia, non esiste un collegamento meccanico diretto tra i due componenti. Il valore misurato viene quindi trasmesso senza contatto (contactless).
Tutti gli encoder senza contatto di MEGATRON si basano sul magnetismo o su un principio di misura ottico. Con gli encoder magnetici l'usura dell'acquisizione (elettronica) è praticamente nulla, mentre con gli encoder ottici solo l'unità di rilevamento ottico ha una durata limitata. L'unica usura significativa negli encoder senza contatto si verifica nei componenti meccanici utilizzati per registrare i valori misurati in presenza di un albero e di un cuscinetto.
Encoder rotativo magnetico con effetto Hall
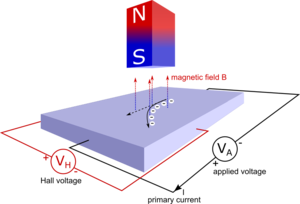
L'effetto Hall, che prende il nome da Edwin Hall, descrive il verificarsi di una tensione elettrica, nota come tensione di Hall, in un conduttore portatore di corrente (elemento di Hall) situato in un campo magnetico stazionario. Se un magnete permanente circolare, magnetizzato diametralmente (polo nord/polo sud), viene posto sopra un elemento di Hall, il magnete viene fatto ruotare e viene misurata la tensione all'uscita del circuito amplificatore, si misura una curva sinusoidale della tensione di uscita.
In linea di principio, i campi magnetici esterni possono interferire con questa tecnologia. Vengono utilizzati soprattutto i cosiddetti sensori di Hall a gradiente, che sono in gran parte insensibili a questi disturbi. Per maggiori dettagli, consultare la nostra guida sugli encoder assoluti.
| Vantaggi degli encoder magnetici | Svantaggi degli encoder magnetici |
|
|
Encoder ottici

I codificatori ottici si basano su un principio di scansione ottica senza contatto. La luce viene generata da un diodo ad emissione luminosa che, attraverso una matrice di codifica, viene riflessa da un fotorilevatore. Il fotorilevatore genera un segnale elettrico che viene elaborato dall'elettronica e utilizzato per emettere il valore misurato.
Negli encoder rotativi senza contatto con sistemi di scansione ottica, i diodi luminosi sono soggetti a un processo di invecchiamento continuo durante il funzionamento. Inoltre, la polvere sul sistema ottico contribuisce all'invecchiamento del sensore.
Per maggiori dettagli, consultare la nostra guida agli encoder incrementali.

Matrice di codifica
Fare clic qui per una panoramica di tutti gli encoder ottici incrementali.
| Vantaggi degli encoder ottici | Svantaggi degli encoder ottici |
|
|
Encoder incrementali
Gli encoder incrementali emettono una serie di segnali rettangolari invece di informazioni proporzionali all'angolo (vedere encoder assoluti). Sono noti anche come impulsi. Gli encoder incrementali sono quindi chiamati anche encoder a impulsi e il numero di impulsi per giro è sempre indicato (unità imp./giro). Un impulso corrisponde alla durata di un periodo. Il termine "un incremento" viene utilizzato anche per indicare un periodo di tempo. Questo spiega anche il termine encoder incrementale. Per valutare il risultato della misurazione di un encoder incrementale è sempre necessaria un'unità di valutazione esterna, come un contatore.
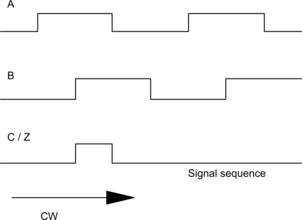
Sequenza di segnali encoder incrementale
Prestare particolare attenzione ai seguenti punti:
- Per la misurazione dell'angolo, il numero di impulsi deve essere contato in un'unità di valutazione esterna e la somma degli impulsi deve essere convertita in un angolo.
- Se l'alimentazione del contatore viene interrotta, le informazioni del contatore vanno generalmente perse. Se si vuole misurare o calcolare il valore assoluto dell'angolo rispetto a un punto di riferimento, il riferimento deve essere effettuato passando per la posizione zero.
- Per la misura della velocità, si calcola il numero di impulsi per tempo.
Gli encoder incrementali sono disponibili con diversi numeri di impulsi per giro. Ad esempio, 360 impulsi/giro significa che vengono emessi 360 impulsi (360 periodi del segnale) per ogni giro completo dell'albero (360°). Se, ad esempio, si specifica 1024 impulsi/giro, significa che vengono emessi 1024 impulsi (1024 periodi di segnale) per ogni giro completo dell'albero (360°). Gli encoder incrementali sono disponibili presso MEGATRON come encoder Hall e come encoder ottici. Per una descrizione dettagliata, consultare la guida agli encoder incrementali.
Encoder assoluti
Gli encoder assoluti emettono un segnale analogico o digitale proporzionale all'angolo. Esiste quindi un punto di riferimento fisso per la misurazione dell'angolo. Gli encoder con uscita analogica forniscono l'angolo misurato come tensione di uscita, corrente di uscita o larghezza di impulso (PWM). Le interfacce digitali per l'uscita di valori assoluti sono disponibili sotto forma di protocolli di comunicazione. Per una descrizione dettagliata, consultare la guida agli encoder assoluti.
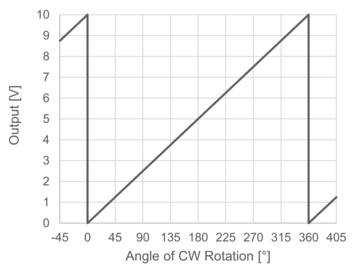
Segnale di uscita analogico da un encoder assoluto monogiro
| Angolo misurato [°, gradi] | Tensione di uscita [Volt] |
| 0° | 0 V |
| 360° | 10 V |
| 45° | 1.25 V |
| 90° | 2.5 V |
| 180° | 5 V |
| 360° | 10V |
La tabella mostra la curva della tensione di uscita a diversi angoli di misurazione utilizzando come esempio un'uscita di tensione di 0...10 V.
Encoder monogiro e multigiro
Encoder monogiro

Gli encoder monogiro sono encoder assoluti che possono misurare solo l'angolo di un giro completo. Dopo un giro completo, il segnale di uscita sarà lo stesso di 0° ogni 360°. La maggior parte degli encoder assoluti monogiro misura l'intera gamma di angoli, da 0° a un massimo di 360°. Solo alcuni prodotti misurano gli angoli in un intervallo angolare limitato, ad esempio ±45°.
Encoder multigiro
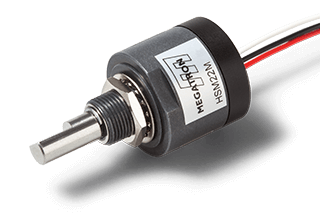
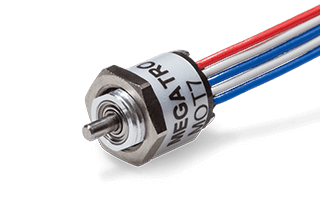
Encoder assoluto True-Power-On HSM22M

Rispetto agli encoder monogiro, gli encoder multigiro sono in grado di misurare angoli superiori a 360°. Il sistema di misura è in grado di contare il numero di giri e di solito è programmato in modo che il segnale aumenti continuamente nell'intervallo angolare massimo elettricamente efficace. Ad esempio, alcuni encoder assoluti multigiro MEGATRON possono misurare angoli fino a un massimo di 72000° (fino a 200 giri dell'albero). Fare clic qui per una panoramica di tutti gli encoder multigiro.
Senza particolari precauzioni, questi encoder perdono le informazioni sulla posizione in caso di interruzione dell'alimentazione. Una classe di encoder multigiro è costituita dagli encoder True-Power-On. Questi encoder forniscono un segnale di uscita corretto anche se l'angolo di rotazione cambia durante una temporanea perdita di alimentazione.
Dispositivo di valore reale e dispositivo di setpoint
I due termini "dispositivo di valore reale" e "dispositivo di setpoint" sono definiti in base alla loro funzione nell'applicazione. Alcuni modelli di encoder possono essere utilizzati per entrambi gli scopi.
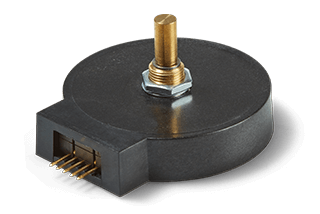
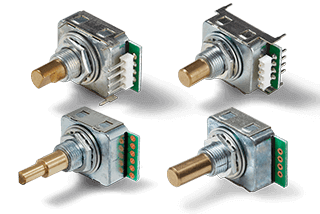
In un dispositivo setpoint, un valore viene impostato manualmente. Un setpoint viene impostato ruotando manualmente l'albero dell'encoder (di solito tramite una manopola montata sull'albero). Queste manopole sono utilizzate nei pannelli di controllo, ad esempio per navigare nei menu o per impostare vari parametri degli strumenti di misura. Fare clic qui per una panoramica dei dispositivi di ingresso manuale.
L'encoder a valore reale è usato come sinonimo di sensore angolare o encoder rotativo quando un angolo viene semplicemente misurato e non specificato manualmente. Poiché questo non corrisponde necessariamente al setpoint in un'applicazione, i due termini vengono utilizzati per distinguerli. I trasmettitori di valore nominale e reale possono far parte di loop di controllo.

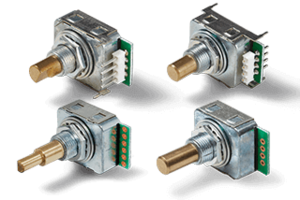
Encoder rotativiMRX50 come dispositivi di setpoint
Proprietà angolari e senso di rotazione
Angolo di rotazione meccanico
L'angolo di rotazione meccanico è l'angolo totale in cui l'encoder può essere azionato meccanicamente. Per la maggior parte degli encoder senza contatto, l'angolo meccanico di rotazione non è limitato meccanicamente, vale a dire che l'albero dell'encoder può essere ruotato continuamente in senso orario e antiorario senza interrompere la rotazione. Con poche eccezioni, sono disponibili arresti di fine corsa meccanici. Questi sono particolarmente utili per i dispositivi di regolazione (regolatori manuali). Un esempio è la serie ETAM25 di MEGATRON, dotata di fine corsa meccanici.
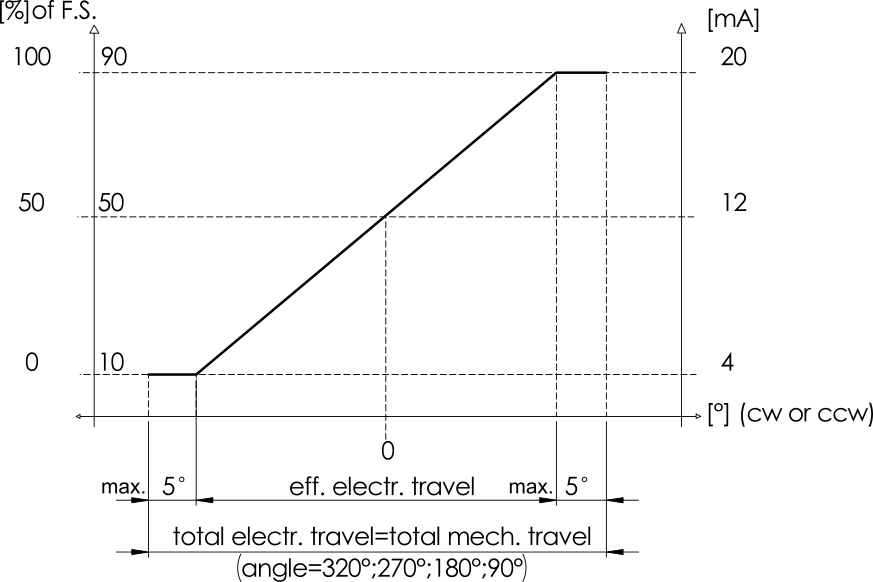
Informazioni sull'angolo e sulla direzione di rotazione elettrica e meccanica per la serie ETAM25
Angolo di rotazione elettricamente efficace
L'angolo di rotazione elettricamente efficace è l'intervallo angolare in cui cambia il segnale di uscita. I diagrammi seguenti mostrano esempi di funzioni di uscita di encoder assoluti monogiro. In entrambi i casi, l'angolo di rotazione meccanico è di 360°.
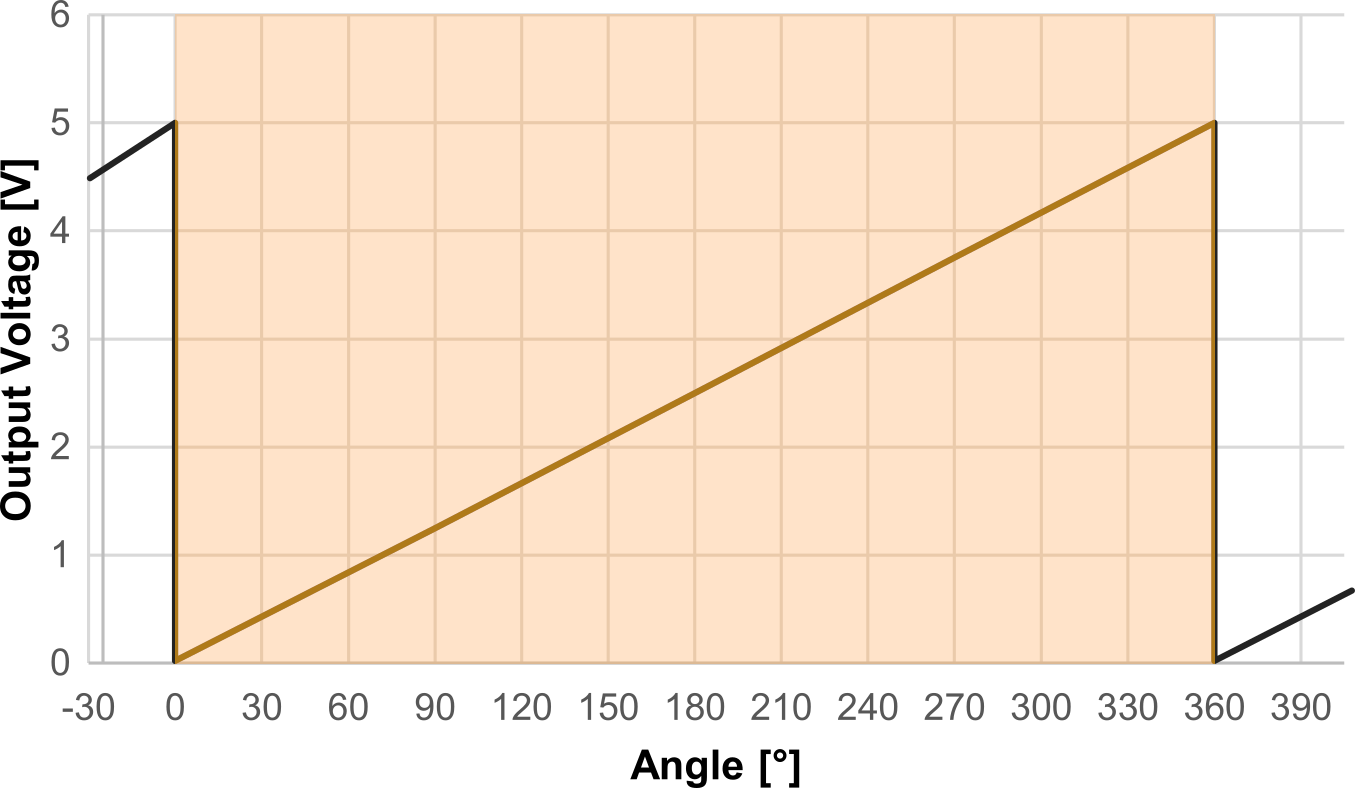
Esempio 1
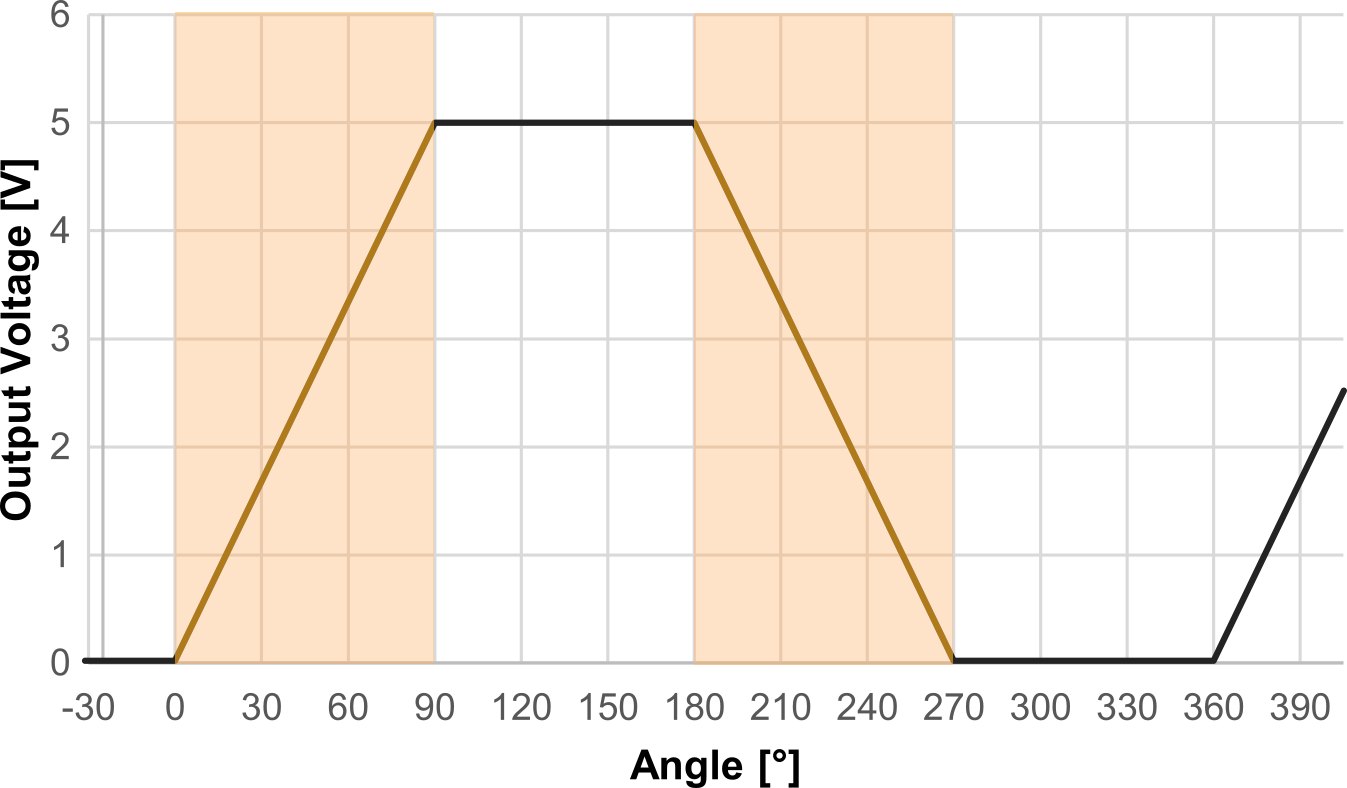
Esempio 2
- Nel primo esempio, il segnale dell'encoder varia sull'intero intervallo angolare di 0...360°. L'intervallo indicato in arancione è l'angolo di rotazione elettricamente effettivo.
- Nel secondo esempio, programmando il segnale di uscita in modo diverso, ci sono due aree diverse in cui si verifica una variazione del segnale: In questo caso l'angolo di rotazione elettricamente efficace è compreso tra 0°...90° e tra 180°...270°.
Senso di rotazione (CW/CCW)
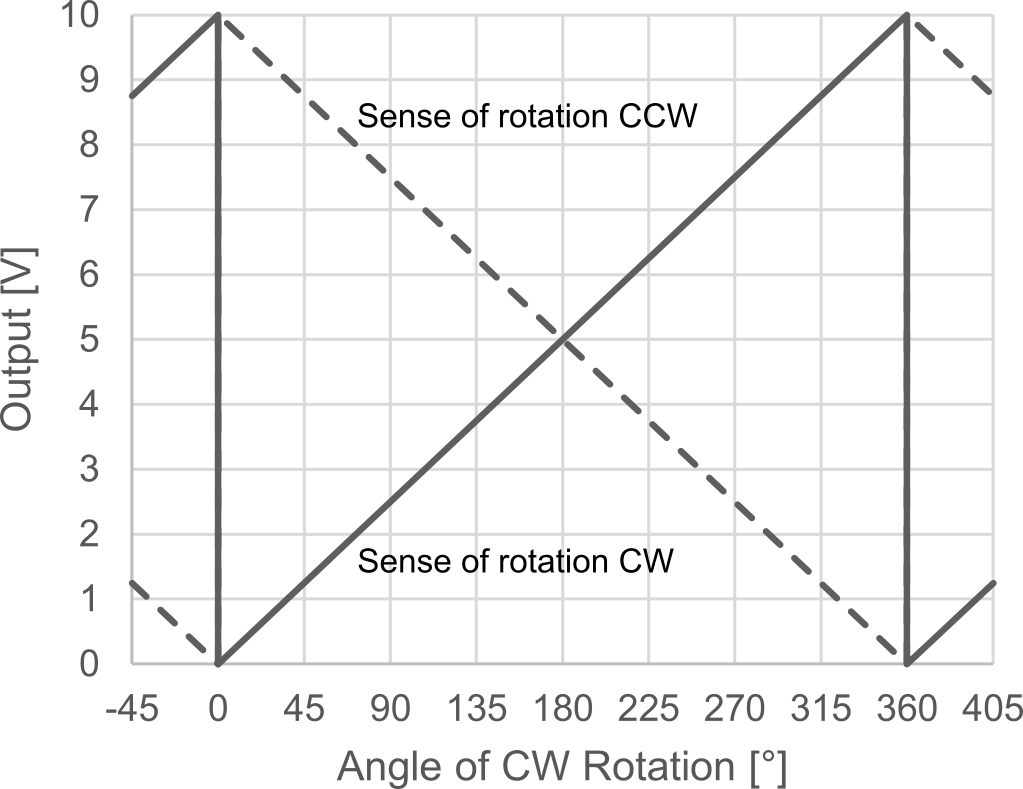
Quando si programma la forma d'onda di uscita, è importante specificare il senso di rotazione della forma d'onda di uscita desiderata. Il senso di rotazione deve essere specificato quando si descrive la forma d'onda di uscita desiderata, in modo che vi sia una relazione univoca tra il segnale e il senso di rotazione dell'albero.
Il senso di rotazione dell'albero è dato quando l'encoder è visto frontalmente. Cioè, quando l'osservatore guarda il cuscinetto dell'albero e l'estremità dell'albero. Nel caso di un encoder in kit (senza albero proprio), l'osservazione viene effettuata sul lato dell'alloggiamento rivolto verso il magnete.
Si distingue tra rotazione oraria e antioraria. Le abbreviazioni CW per il senso orario e CCW per il senso antiorario sono ormai consolidate. I diagrammi a fianco illustrano la differenza delle caratteristiche del segnale utilizzando come esempio un encoder assoluto a un giro. Per quasi tutti gli encoder assoluti il senso di rotazione, orario o antiorario, può essere selezionato dal cliente al momento della configurazione dell'encoder.
Risoluzione e frequenza di aggiornamento
I dispositivi a funzionamento digitale elaborano i segnali di misura con una certa risoluzione. Per gli encoder assoluti con elaborazione digitale del segnale, sono rilevanti due parametri, che si trovano anche nella scheda tecnica dell'encoder:
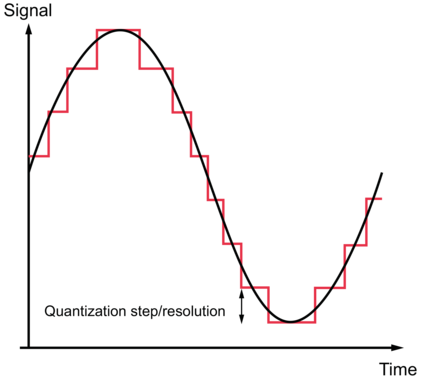
La risoluzione (in bit)
- Quanto più alta è la risoluzione di un sensore a funzionamento digitale, tanto più fini sono i segnali analogici che possono essere elaborati. Le curve di uscita analogiche dei dispositivi digitali presentano quindi sempre un gradino fino (scala). L'altezza di questi gradini è determinata dalla risoluzione del sensore.
La frequenza di aggiornamento (in microsecondi [µs] o millisecondi [ms])
- I segnali dei sensori a funzionamento digitale vengono sempre trasmessi con un certo ritardo.
Se queste informazioni sono riportate sulla scheda tecnica di un encoder, significa che l'encoder elabora i dati in modo digitale. Per una descrizione dettagliata del significato di questi valori e di esempi di calcolo, consultare la guida agli encoder assoluti.
Protezione contro gli influssi ambientali / Protezione IP
IP sta per Ingress Protection (protezione dall'ingresso). Il grado IP specifica le misure adottate per proteggere i cuscinetti dell'albero, l'alloggiamento e le connessioni elettriche di un prodotto dall'ingresso di corpi solidi e acqua dolce. Il termine formale corretto è classe di protezione IP di un prodotto.
La considerazione della protezione dai liquidi si applica solo all'acqua dolce. Tutti gli altri mezzi come oli, acqua salata, sospensioni, alcali o acidi sono esclusi.
La specifica IP è composta da due cifre, seguite dalle due lettere "IP":
- Prima cifra: Protezione contro le particelle penetranti
- Seconda cifra: Protezione contro l'ingresso di acqua dolce

Encoder in kit di Hall ETx25K completamente sigillato: Attenzione, il magnete è esposto. La sigillatura si applica solo all'elettronica e alla custodia.
Distinzione della protezione della PI
Lato albero, lato posteriore o protezione IP del collegamento elettrico
Per gli encoder angolari senza contatto, oltre al valore complessivo del prodotto, si distingue tra protezione IP sul lato albero, protezione IP sul lato posteriore e protezione IP del collegamento elettrico. Tuttavia, nel caso di un cavo di collegamento elettrico con estremità stagnate, le estremità del cavo sono escluse dalla protezione IP.
Protezione IP osservata con un albero in movimento e a riposo
Per i sistemi di misura angolari dotati di un proprio cuscinetto d'albero, spesso si distingue tra il grado di protezione dell'albero in movimento e quello dell'albero a riposo. In questi casi, le informazioni sono definite dalle lettere "M" per movimento (albero in movimento) o "S" per arresto (albero fermo) che seguono i numeri di protezione IP.
Una protezione IP più elevata sul lato albero per un albero fermo può essere rilevante se l'encoder fa parte di un'applicazione/impianto che viene pulito solo quando l'impianto è fermo.
Collegamenti elettrici
Tensione di alimentazione
Tutti gli encoder angolari senza contatto richiedono un'alimentazione a tensione continua (VSUP) per funzionare. Si distingue tra encoder in cui la tensione di alimentazione varia entro un intervallo definito quando
- esiste una relazione raziometrica con il segnale di uscita
- non esiste una relazione raziometrica, ossia non ha alcun effetto sul segnale di uscita
Con una relazione raziometrica tra tensione di alimentazione e segnale di uscita, il segnale di uscita varia nello stesso rapporto moltiplicativo della tensione di alimentazione. Questa opzione è disponibile solo per gli encoder assoluti con uscita del segnale analogico.
Inoltre, non tutti gli intervalli di tensione di alimentazione disponibili possono essere combinati con tutte le elettroniche di uscita. Quando si seleziona la tensione di alimentazione, verificare che il circuito di uscita richiesto sia disponibile per la tensione di alimentazione desiderata. Per le possibili combinazioni, consultare la scheda tecnica dell'encoder.
Ridondanza
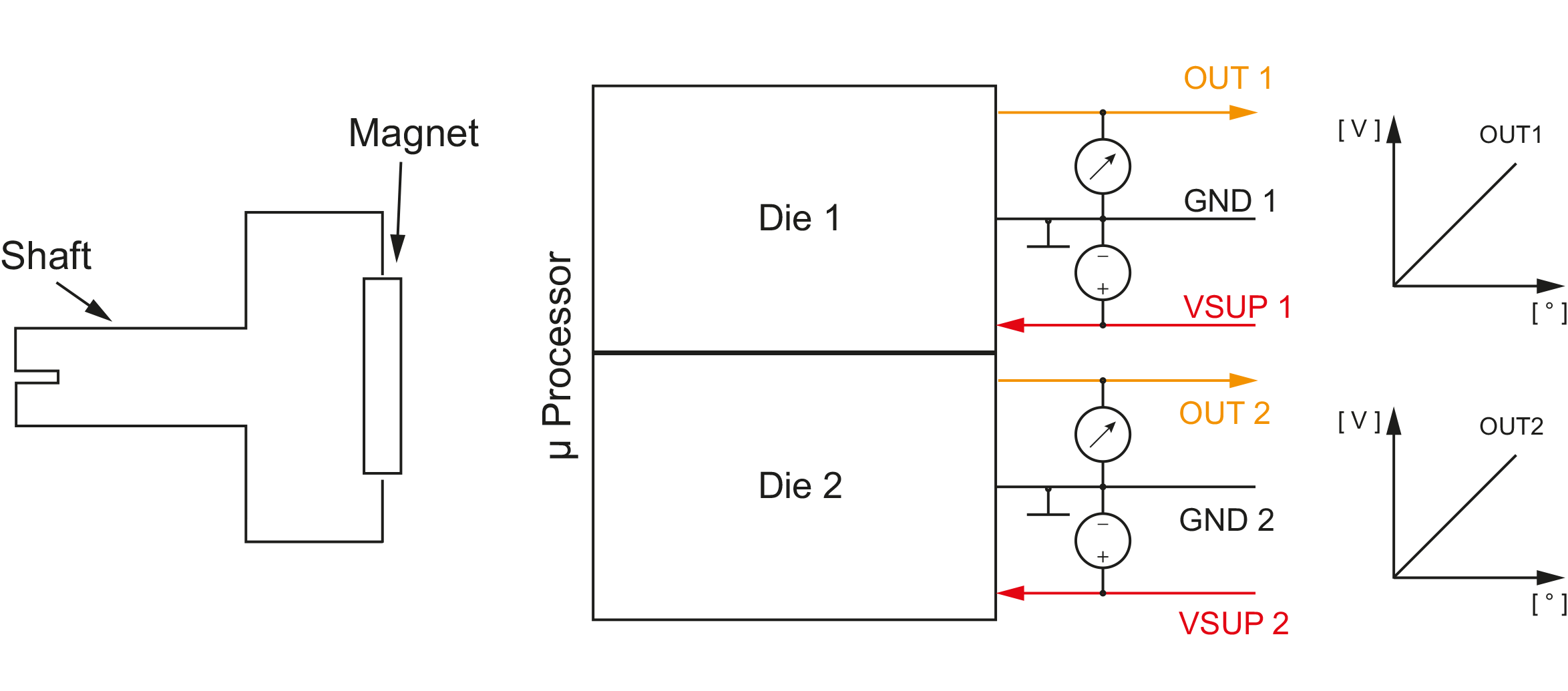
Alcune applicazioni richiedono la ridondanza del segnale del sensore. Gli encoder ridondanti sono spesso utilizzati per i seguenti motivi:
Aumento della disponibilità del sistema
- Il design a doppio sensore riduce la probabilità di guasti al sistema. Se una delle due linee si guasta, viene registrato un guasto. Tuttavia, la macchina o l'impianto può continuare a funzionare fino al successivo intervallo di manutenzione, quando il sensore può essere sostituito senza perdere tempo.
Maggiore sicurezza operativa
- Quando si utilizzano macchinari critici per la sicurezza (ad esempio, veicoli, aerei, ecc.), un guasto può essere fatale. La ridondanza consente un arresto sicuro e controllato di queste macchine o sistemi fino alla sostituzione del sensore. La ridondanza è obbligatoria per molte di queste applicazioni.
Se in linea di principio non è possibile installare due encoder, è possibile implementare encoder con due tensioni di alimentazione separate e una massa separata (GND) per il funzionamento dell'encoder, fornendo un'elettronica aggiuntiva isolata galvanicamente.
- Negli encoder magnetici, il magnete si trova sempre all'estremità dell'albero. Non è quindi possibile far passare l'albero attraverso l'alloggiamento per raggiungere un altro sensore. L'elemento di rilevamento magnetico stesso è doppio/ridondante e, in alcuni modelli, isolato galvanicamente come opzione.
- Con gli encoder ottici è possibile produrre versioni tandem che condividono solo l'albero meccanicamente, ma che per il resto sono completamente duplicate.
Uscite di segnale
Per gli encoder assoluti senza contatto sono disponibili le seguenti uscite di segnale.
Analogica:
- Uscita di tensione (diversi intervalli, raziometrica, non raziometrica)
- Corrente (0...20 mA, 4...20mA,...)
- Modulazione di larghezza di impulso (PWM)
Digitale:
- SPI: Interfaccia periferica seriale
- SER: Forma speciale del formato SPI
- SSI: Interfaccia seriale sincrona
Per gli encoder incrementali senza contatto sono disponibili i seguenti circuiti di uscita:
- OC (collettore aperto, resistenza di pull-up non integrata nell'encoder)
- Uscita di tensione (circuito a collettore aperto con resistenze di pull-up integrate nell'alloggiamento dell'encoder)
- TTL (logica transistor-transistor)
- PP (Push Pull)
- Linedriver
Cablaggio
Lunghezze e tolleranze dei cavi
Le tolleranze dei cavi elettrici per gli encoder angolari sono diverse da quelle delle custodie e degli alberi degli encoder. Nota: se le tolleranze dei cavi non sono esplicitamente indicate nella scheda tecnica, si applica la norma IPC / WHMA-A-620:
| Lunghezza del cavo | Tolleranza ammessa del cavo di collegamento (compresa la spina) |
| ≤0.3 m | +25 mm -0 mm |
| >0,3 m...1,5 m | +50 mm -0 mm |
| >1,3 m...3 m | +100 mm -0 mm |
| >3 m...7,5 m | +150 mm -0 mm |
| >7.5 m | +5% -0% |
Schermatura del cavo
Per gli encoder angolari MEGATRON con custodia metallica, il cavo di collegamento è schermato da una schermatura esterna. Per tutti gli encoder angolari con custodia in plastica, il cavo di collegamento non è schermato.
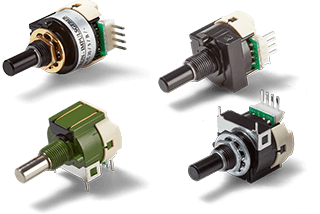
Design degli encoder rotativi
Gli encoder sono disponibili in diversi tipi di custodia. Si distinguono in encoder in kit (senza cuscinetti ni albero) ed encoder con cuscinetti per l'albero. Questi ultimi sono disponibili con cuscinetti a strisciamento o a sfera e con alberi pieni o cavi.
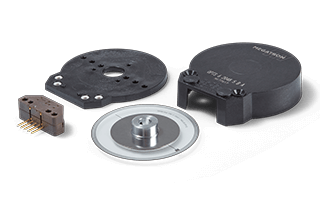
Kit-Encoder

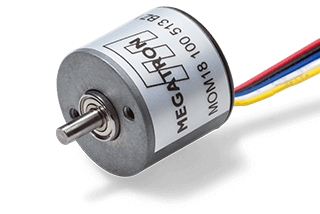
Encoder magnetico in kit serie MAB12AH
Gli encoder in kit sono privi di albero e quindi di cuscinetto. Per questi encoder si usa anche il termine "encoder con cuscinetto esterno", perché il cuscinetto non fa parte dell'encoder. Negli encoder magnetici, un magnete è fissato all'estremità dell'albero, mentre negli encoder ottici in kit il disco matrice dell'encoder è fissato all'albero dell'applicazione. Gli encoder in kit sono adatti a velocità elevate, fino a molte migliaia di giri al minuto, e sono praticamente esenti da usura meccanica.
A causa della mancanza di connessione meccanica tra il magnete e l'encoder, è possibile realizzare i seguenti disaccoppiamenti:
- Disaccoppiamento meccanico
- Disaccoppiamento galvanico (nessun riferimento di potenziale elettrico tra albero ed encoder)
- Disaccoppiamento termico
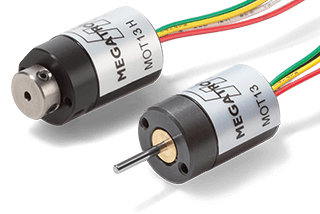
Encoder con cuscinetti - "encoder ad albero pieno" e "encoder ad albero cavo"
Questi encoder sono dotati di un proprio cuscinetto per l'albero. Si distingue inoltre tra due modelli: Encoder ad albero pieno (spesso indicati semplicemente come "albero") ed encoder ad albero cavo.
Le versioni con albero pieno sono anche chiamate encoder ad albero. Per gli encoder ad albero si usa anche il termine "encoder angolare con albero portante integrato".
Gli encoder ad albero cavo, come suggerisce il nome, non hanno un albero solido. Un albero lato applicazione viene inserito nell'albero cavo e fissato ad esso. Nelle versioni con foro passante, è addirittura possibile far passare l'albero completamente attraverso l'encoder, che può quindi essere posizionato liberamente in senso assiale.

Installazione e montaggio
Le possibilità di montaggio meccanico dell'encoder nell'applicazione dipendono dal design dell'alloggiamento dell'encoder. MEGATRON offre un totale di cinque diverse opzioni di montaggio per le sue famiglie di encoder senza contatto. Il montaggio può essere effettuato mediante
- Boccola
- Flangia
- Fori filettati
- Flangia sincro
- Anello di montaggio
- Piastra elastica
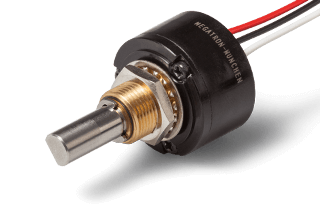
Filetto centrale e dado di raccordo (boccola)

La versione a filettatura centrale è un metodo di montaggio molto semplice e rapido. Per montare un encoder con boccola, in genere è sufficiente praticare un unico foro nella piastra di montaggio dell'applicazione. La bussola dell'encoder viene inserita attraverso questo foro fino a quando la faccia dell'alloggiamento dell'encoder o la superficie del collare di posizionamento sono a contatto con la piastra di montaggio. Infine, l'encoder viene fissato alla piastra di montaggio con un dado di raccordo e una rondella di spessore/blocco. Il dado e la rondella sono spesso forniti con l'encoder.
Alcune famiglie di encoder dispongono anche di un perno antirotazione. Questo impedisce la rotazione involontaria dell'alloggiamento dell'encoder intorno all'asse centrale quando si stringe il dado di accoppiamento. Per questo perno antirotazione è necessario praticare un secondo foro aggiuntivo nella piastra di montaggio. Il perno antirotazione (se presente) funge anche da riferimento di zero (posizione 0°).
Per montare l'encoder in una piastra di montaggio, il foro deve perforare completamente la piastra di montaggio. Ciò può consentire la penetrazione di liquidi e polvere dalla parte anteriore a quella posteriore della piastra di montaggio. Per evitare ciò, viene fornita una guarnizione opzionale da inserire tra la parte anteriore dell'encoder e la piastra di montaggio. Questa guarnizione è un'opzione per la famiglia di encoder ETx25, ad esempio.
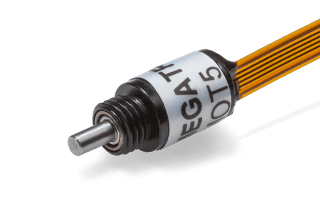
Encoder assoluto serie ETA25 con filettatura centrale (boccola)
Montaggio a flangia
Il montaggio a flangia è un metodo di montaggio semplice e ampiamente utilizzato che impedisce all'alloggiamento dell'encoder di ruotare intorno all'asse centrale durante il montaggio. Per montare l'encoder, è necessario praticare tre fori in una piastra di montaggio dell'applicazione. Un foro è necessario per il collare di centraggio o la filettatura, mentre altri due sono necessari per il montaggio a vite dell'encoder. Le viti di montaggio di solito non sono fornite con l'encoder.
Montaggio con foro filettato
Il montaggio con fori filettati è un metodo molto sicuro e si basa su componenti standard disponibili in commercio. Per montare tali encoder, è necessario praticare almeno tre fori in una piastra di montaggio dell'applicazione: Un foro per il collare di centraggio e altri due fori per il montaggio dell'encoder. Un foro filettato nell'alloggiamento dell'encoder serve come riferimento a 0°. Le viti di montaggio non sono normalmente fornite con l'encoder.

Montaggio della flangia del servo

Questo metodo di montaggio consente di modificare successivamente il punto zero (punto di riferimento) ruotando l'alloggiamento dell'encoder ed è quindi particolarmente utile per gli encoder assoluti. Per il montaggio è necessario praticare almeno quattro fori in una piastra di montaggio.
- Un foro per il collare di centraggio, che penetra completamente nella piastra di montaggio, e altri tre fori sul retro dell'encoder.
- tre fori aggiuntivi sul retro della piastra di montaggio per l'avvitamento dei morsetti, che non devono penetrare nella piastra di montaggio.
I morsetti sincro non vengono forniti con l'encoder e possono essere ordinati come accessori presso MEGATRON. I morsetti servono a fissare l'encoder alla piastra di montaggio mediante una pressione di contatto. Il quarto foro filettato nell'alloggiamento dell'encoder serve come riferimento del punto zero (riferimento 0°).

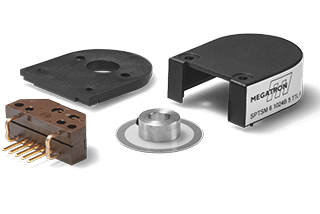
Montaggio tramite anello di montaggio
Questo metodo di montaggio è limitato agli encoder senza cuscinetti per l'albero (encoder in kit). Per il montaggio, è necessario praticare almeno tre fori in una piastra di montaggio: Un foro per il collare di centraggio, che deve penetrare completamente nella piastra di montaggio, e almeno altri due fori sul retro della piastra di montaggio per il fissaggio dell'anello di montaggio, che non devono penetrare nella piastra di montaggio. Se l'encoder viene inizialmente montato in modo lasco con l'anello di montaggio, è possibile ruotare l'encoder intorno all'asse centrale per allineare il punto zero (particolarmente utile per gli encoder assoluti). La posizione viene poi fissata semplicemente stringendo le viti.

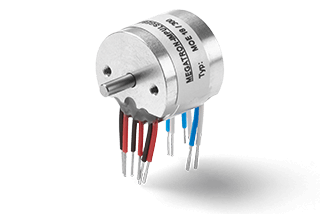
Kit encoder serie MAB12AH con anello di montaggio
Gruppo piastra elastica
Questo metodo di montaggio viene utilizzato solo per gli encoder ad albero cavo. Il vantaggio di questo metodo è che le influenze meccaniche sull'encoder causate dalle eccentricità radiali e assiali dell'albero lato applicazione possono essere ridotte al minimo, riducendo così il carico sul cuscinetto. Questo metodo di montaggio richiede un minimo di 2 fori per il montaggio dell'encoder.

Personalizzazione del prodotto
Da oltre 60 anni, MEGATRON è un partner affidabile per la vostra progettazione. Oltre all'ampia gamma di opzioni disponibili per i nostri sensori, offriamo anche progetti specifici, anche in piccole quantità, che si adattano esattamente alle vostre esigenze applicative. Che siate nelle fasi iniziali di un progetto o nella produzione in serie, siamo qui per supportarvi.

























Gli encoder sono sensori che utilizzano l'elettronica per catturare le informazioni angolari in un'applicazione e convertirle in segnali elettrici. L'optoelettronica e le tecnologie avanzate basate sui sensori a effetto Hall forniscono risultati di misura eccellenti. Inoltre, grazie al principio di misura senza contatto, i sensori hanno una durata particolarmente lunga. L'ampia gamma di uscite di segnale elettrico, di connessioni e di design degli encoder offre molte opzioni per soddisfare le vostre applicazioni.
Una caratteristica fondamentale è la gamma di angoli che l'encoder è in grado di rilevare. Gli encoder monogiro coprono angoli fino a 360 gradi, mentre gli encoder multigiro coprono angoli superiori. Esiste anche una differenza tra uscita assoluta e incrementale. Anche le considerazioni ambientali e la facilità di manutenzione sono importanti nella scelta del prodotto giusto.
Tra tutti i parametri possibili, ogni tecnologia di sensore ha i suoi vantaggi e ogni sensore ha le sue caratteristiche specifiche, che saremo lieti di elaborare insieme ai vostri requisiti applicativi nell'ambito della nostra consulenza. Nelle applicazioni più complesse, spesso sono necessari adattamenti tecnici dei prodotti. MEGATRON è il vostro specialista in questi casi e offre le migliori soluzioni tecniche ed economiche. In qualità di partner affidabile e a lungo termine, vi supporteremo dalla richiesta iniziale, alla produzione in serie, fino alla "fine del ciclo di vita" della vostra applicazione, con un'elevata affidabilità di consegna e una qualità del prodotto garantita.