 EN
EN DE
DE ES
ES FR
FR IT
IT










Encoder assoluti
Encoder rotativi magnetici per la misura dell'angolo assoluto
Guida Encoder assoluti
Indice
Che cos'è un encoder assoluto?

Gli encoder assoluti sono encoder rotativi che misurano gli angoli, convertono queste informazioni in segnali elettrici e li emettono come valori assoluti. L'uso dell'elettronica per elaborare il valore misurato li distingue dai potenziometri, che forniscono anch'essi valori assoluti ma sono componenti passivi senza elettronica integrata. Gli encoder assoluti hanno un punto di riferimento fisso per la misurazione dell'angolo a cui il valore di uscita è sempre riferito. Il principio di un encoder assoluto è fondamentalmente diverso da quello di un encoder incrementale, ad esempio, in cui l'encoder trasmette solo le variazioni angolari (valori relativi).
Gli encoder assoluti si dividono in due categorie in base all'intervallo angolare da misurare. Gli encoder che misurano angoli su più giri sono chiamati encoder multigiro, mentre gli encoder che misurano angoli fino a 360° sono chiamati encoder monogiro.
Programmazione del segnale degli encoder assoluti
Gli encoder assoluti offrono un'ampia gamma di opzioni per la visualizzazione dei valori angolari misurati come funzione di segnale elettrico in uscita. L'elettronica di molti encoder è programmabile e consente di personalizzare le forme d'onda in uscita. L'esempio seguente mostra la programmazione standard di fabbrica di un encoder assoluto analogico:
L'encoder è programmato in senso orario con un segnale di uscita di 0...10 V (quando l'albero ruota in senso orario) e misura un angolo di 0...360°.
Quando è a 0°, emette 0 V. Quando l'albero ruota di 90° in senso orario, fornisce un valore di 90°/360° * 10 V = 2,5 V. Questo valore rimane costante finché l'albero dell'encoder non viene spostato. La figura dell'esempio 1 mostra la curva del segnale di un encoder assoluto di questo tipo.
| Angolo misurato [° gradi] | Tensione di uscita [Volt] |
| 0° = 0 V | 0 V |
| 360° = 10 V | 10 V |
| 45° = 1.25 V | 1.25 V |
| 90° = 2.5 V | 2.5 V |
| 180° = 5.0 V | 5 V |
Il termine "fondo scala" viene spesso utilizzato con l'abbreviazione "F.S." per indicare l'intera scala di uscita del segnale. Nell'esempio precedente, F.S. = 10 V. Senza conoscere la tensione massima, la programmazione può essere effettuata anche utilizzando valori percentuali. Ad esempio, 0° corrisponde a 0% F.S. (0% del valore massimo, cioè 0 V) e 360° corrisponde a 100% F.S. (100% del valore massimo, cioè 10 V). In questo modo, la funzione di uscita di un segnale può essere descritta con precisione senza l'uso di un grafico:
0° = 0% F.S.
90° = 100% F.S.
180° = 100% F.S.
270° = 0% F.S.
360° = 0% F.S.
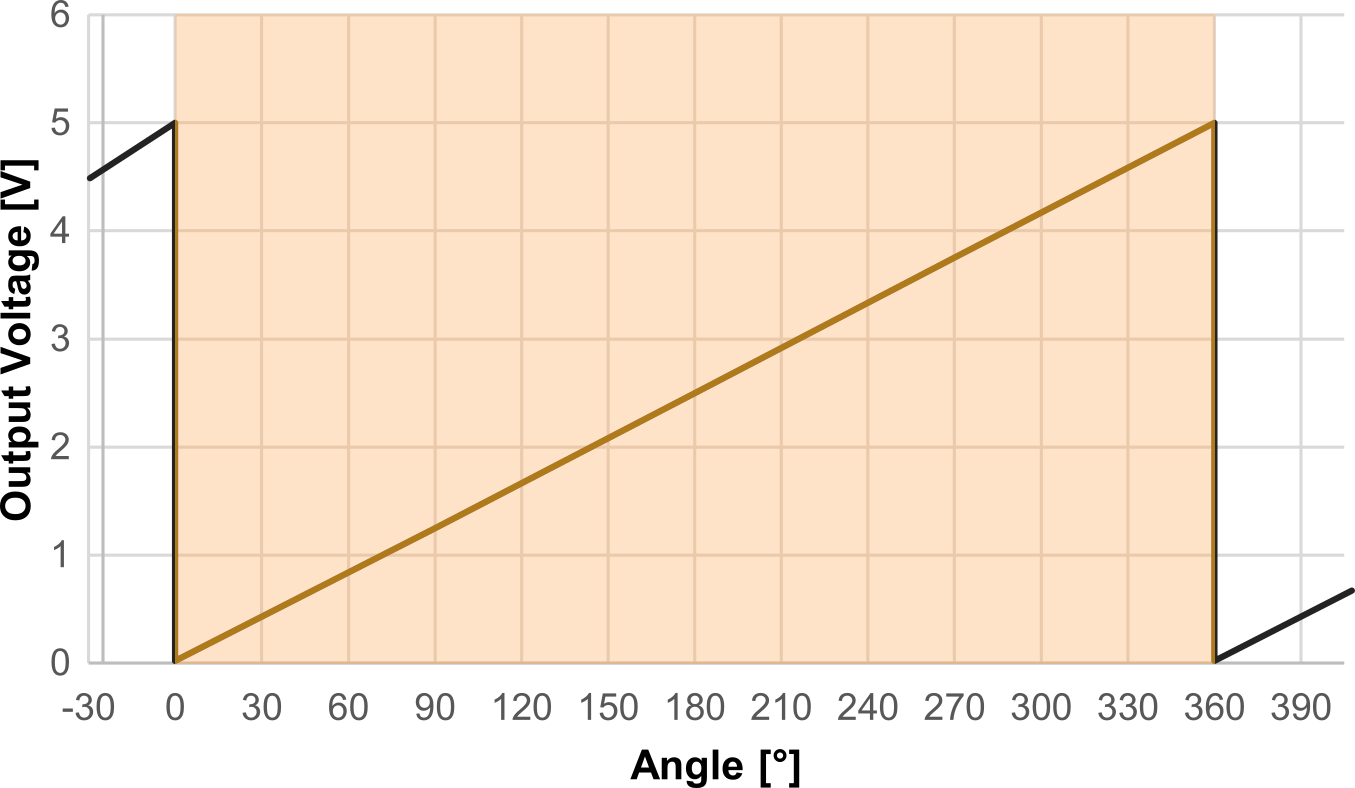
Esempio 1
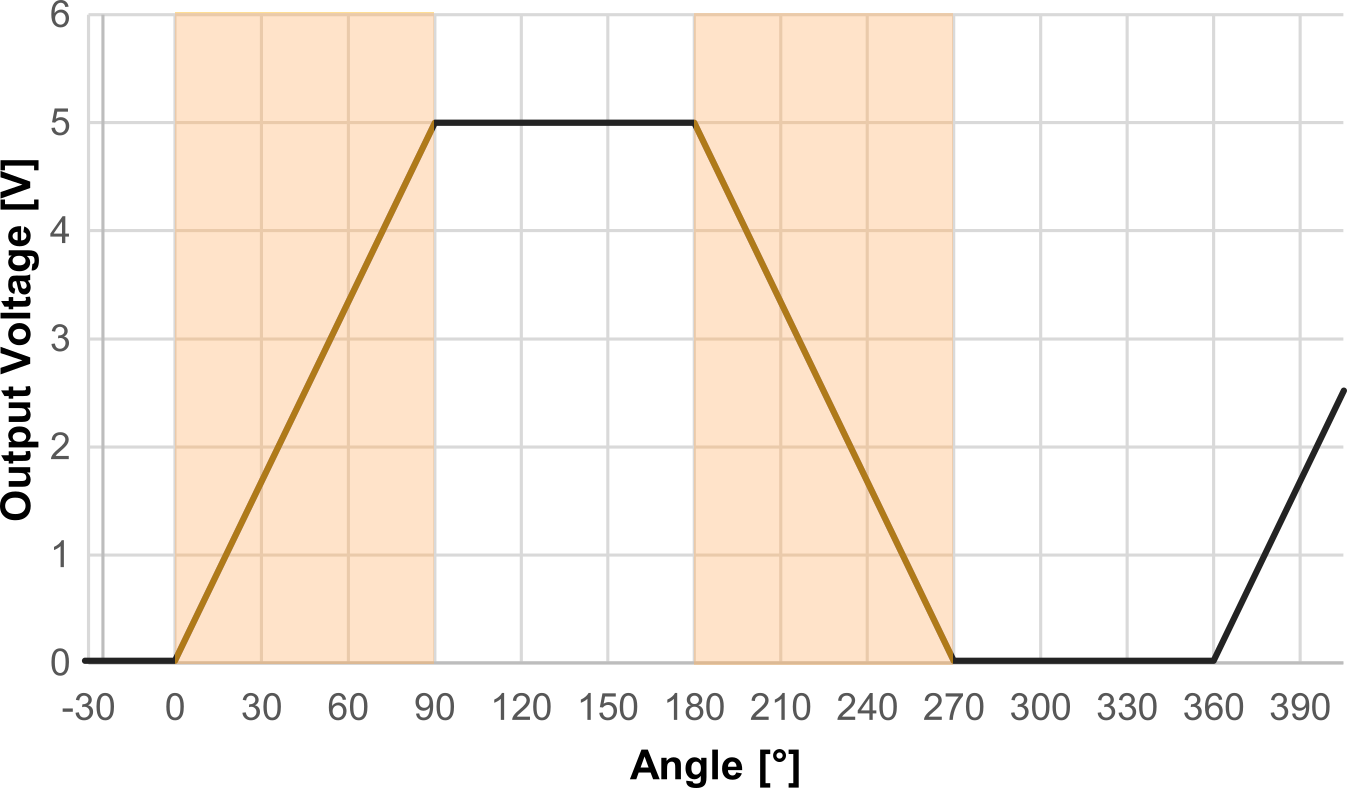
Esempio 2
La figura mostra la curva del segnale per questi requisiti, nell'esempio 2. I segnali di uscita degli encoder assoluti possono essere emessi anche tramite altre interfacce, ad esempio come corrente di uscita o tramite modulazione dell'ampiezza degli impulsi (PWM).
Encoder a effetto Hall
L'effetto Hall è un fenomeno per cui si genera una tensione elettrica in un conduttore portatore di corrente (elemento di Hall) quando questo si trova in un campo magnetico esterno.
L'effetto è mostrato nel diagramma a fianco e può essere spiegato come segue: Quando la corrente scorre attraverso un conduttore elettrico, i portatori di carica (elettroni) si muovono attraverso il conduttore. Se viene applicato un campo magnetico supplementare, ad esempio da un magnete esterno, i portatori di carica vengono deviati perpendicolarmente alla direzione della corrente. Questa forza è chiamata forza di Lorentz: Essa devia i portatori di carica quando si muovono e quando viene applicato un campo magnetico esterno. Gli elettroni si accumulano ora ai bordi del conduttore. La separazione delle cariche crea una tensione aggiuntiva perpendicolare alla direzione della corrente, chiamata tensione di Hall.
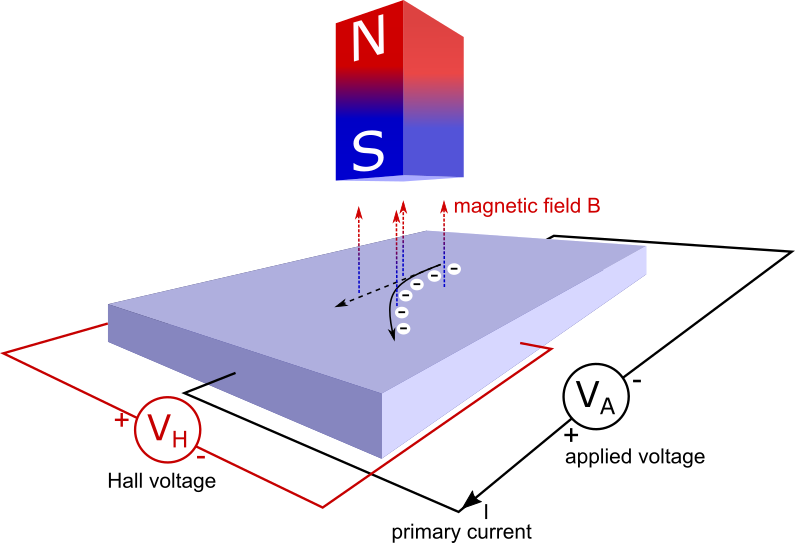
Un campo magnetico genera una tensione di Hall in un conduttore che trasporta corrente.
Se il campo magnetico esterno cambia quando il magnete si muove, cambia anche la tensione di Hall, rendendo relativamente semplice l'implementazione di sensori. Ad esempio, se un magnete permanente circolare, magnetizzato diametralmente (polo nord/polo sud), viene posto sopra un elemento di Hall e il magnete viene fatto ruotare, è possibile misurare una curva sinusoidale della tensione di uscita. Se la posizione del magnete non cambia, il valore misurato rimane costante. Tuttavia, un sensore di Hall può funzionare solo in presenza di corrente, altrimenti la forza di Lorentz non funziona. Pertanto, i sensori di Hall necessitano di corrente durante il funzionamento, anche se la posizione di misurazione non cambia.
Sensori di Hall basati sul gradiente
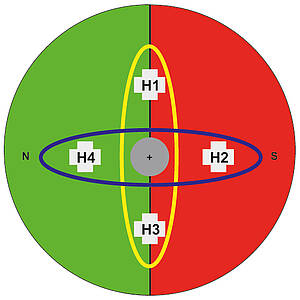
In linea di principio, i campi magnetici esterni possono interferire con la tecnologia Hall se non si prendono precauzioni. Oggi si utilizzano i cosiddetti sensori di Hall a gradiente, che sono in gran parte insensibili a tali interferenze.
Il principio di questa particolare variante consiste nel posizionare due o più sensori di Hall uno vicino all'altro. Il magnete di misura, molto vicino a questi due sensori, crea una differenza nei segnali dei due sensori perché la curvatura del campo è relativamente forte. Tuttavia, un campo esterno di disturbo, che di solito ha una leggera curvatura, viene "visto" da entrambi i sensori allo stesso modo. Se si valuta solo la differenza tra i due sensori (il gradiente), si percepisce praticamente solo il magnete di misura e il sistema di misura è quindi molto robusto ai campi di interferenza esterni.
Risoluzione
La maggior parte degli encoder di Hall sono encoder digitali ed elaborano i segnali di misura con una certa risoluzione. Le informazioni vengono elaborate con un'accuratezza corrispondente al numero di bit. Più alto è questo valore, più fine può essere l'elaborazione dei segnali. Le curve di uscita analogiche dei dispositivi digitali presentano quindi sempre una gradazione fine, la cui altezza è determinata dalla risoluzione. Le risoluzioni tipiche sono 10 bit, 12 bit o 14 bit, a seconda del modello di encoder. Ad esempio, la risoluzione angolare è di 0,088° per 12 bit e di 0,022° per 14 bit. La seguente semplice osservazione aiuta a determinare questi valori:
- La risoluzione viene utilizzata per calcolare il numero di cambi di stato che possono essere visualizzati: 1 bit corrisponde a 2 cambi di stato (poiché21 = 2), 12 bit corrispondono a 4096 cambi di stato (poiché212 = 4096).
- Il numero di cambi di stato viene suddiviso sull'intero intervallo dell'angolo di rotazione elettrico.
Per calcolare la risoluzione angolare, l'angolo elettrico di rotazione effettivo deve essere diviso per il numero di stati possibili:
\(\text {Risoluzione angolare in gradi} =\frac {360°} {2^testo {numero di bit}})
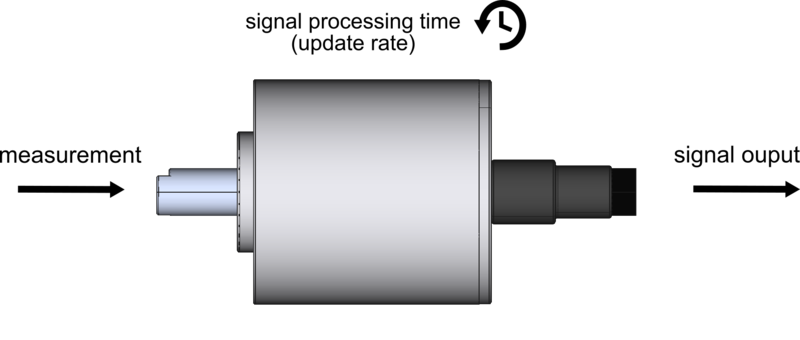
Tasso di aggiornamento
Poiché molti encoder Hall sono dotati di circuiti integrati digitali (IC) che inviano sempre i loro segnali con un certo ritardo, nell'applicazione si deve tenere conto della velocità di aggiornamento in millisecondi. La velocità di aggiornamento è il tempo che intercorre tra l'acquisizione del valore misurato e l'emissione del segnale nell'encoder angolare. Di solito è compresa tra 96 µs e 600 µs per gli encoder magnetici con elaborazione digitale del segnale, ma può arrivare a 3 ms per alcuni encoder multigiro.
L'aumento della frequenza di aggiornamento comporta un maggiore consumo di corrente dell'encoder angolare. Alcuni encoder angolari possono essere ordinati anche con una frequenza di aggiornamento ridotta, ad esempio 600 µs invece di 200 µs, per ridurre il consumo energetico. Questi encoder angolari sono quindi particolarmente adatti all'uso in applicazioni alimentate a batteria con un basso consumo energetico.
Se è richiesta una diversa frequenza di aggiornamento dell'encoder angolare, questa deve essere ordinata franco fabbrica. Questa caratteristica non può essere modificata sul campo. La frequenza di aggiornamento non deve essere confusa con la frequenza di campionamento.
Precisione - Linearità assoluta
Il calcolo della possibile deviazione angolare di un encoder è complesso e dipende da molti fattori, come le influenze ambientali (temperatura), i fattori meccanici (gioco dei cuscinetti), le tolleranze dei componenti elettronici, ecc. Per determinare l'errore angolare di un encoder assoluto in modo affidabile e rapido, si è rivelato pratico un calcolo basato sulla linearità assoluta. La linearità assoluta descrive la massima deviazione percentuale possibile della funzione di uscita del segnale (il risultato della misurazione) da una linea retta ideale. Tuttavia, queste specifiche si applicano alle seguenti condizioni:
- Funzionamento dell'albero in un solo senso di rotazione
- Funzionamento a temperatura ambiente
- Riferimento a un angolo di rotazione elettricamente efficace specificato nella scheda tecnica.
- La linearità assoluta è una considerazione del "caso peggiore".
- In pratica, l'errore angolare effettivo sarà più basso.
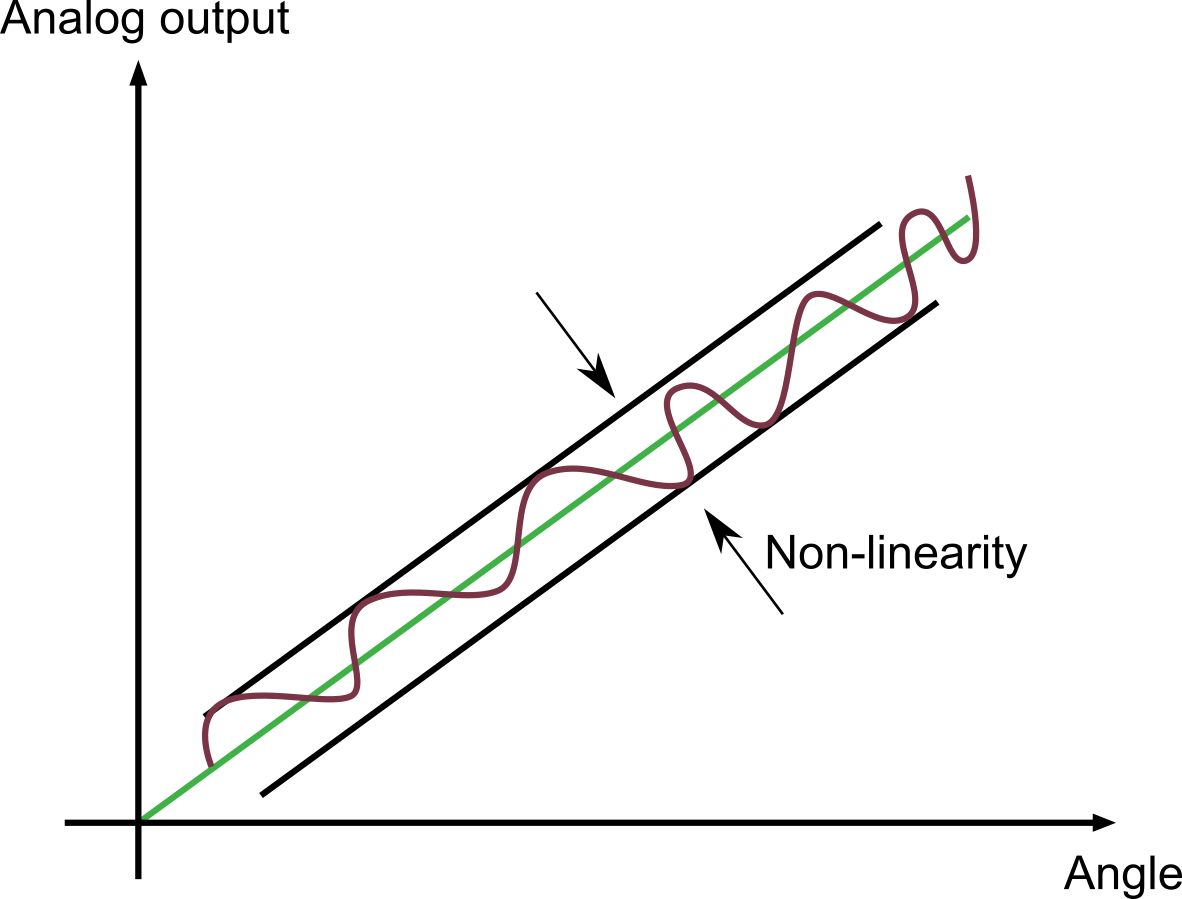
La linearità assoluta descrive la deviazione del segnale (rosso) da una linea retta ideale (verde) che passa per il punto zero.
L'errore angolare è riproducibile per ogni singolo encoder. Ciò significa che per un determinato angolo di rotazione, l'errore sarà sempre approssimativamente lo stesso. L'elevata ripetibilità di un encoder assoluto senza contatto consente quindi di compensare la funzione di uscita del segnale con una funzione di calibrazione memorizzata in un'unità di valutazione, al fine di ridurre l'errore angolare dell'encoder. L'informazione sulla linearità assoluta è un valore fisso nella scheda tecnica degli encoder assoluti.
Le informazioni sulla rettilineità assoluta nella scheda tecnica di un encoder in kit (senza albero) sono fornite a condizione che l'asse centrale del magnete sia allineato con l'asse centrale dell'encoder. Alcune schede tecniche di kit magnetici forniscono anche informazioni su come cambia il valore della linearità assoluta quando il magnete è posizionato in modo eccentrico rispetto all'asse centrale.
Encoder assoluto monogiro e multigiro
Encoder assoluto monogiro
Gli encoder monogiro sono encoder assoluti e sono adatti solo per misurare angoli ≤ 360°, poiché il loro segnale di uscita è uguale a 0° dopo un giro completo. La maggior parte degli encoder assoluti monogiro senza contatto misura quindi un angolo compreso tra 0° e un massimo di 360°. Questa categoria comprende anche modelli con un campo angolare limitato, come ±45°.
Encoder assoluto multigiro
Gli encoder multigiro sono in grado di misurare angoli oltre lo zero, cioè oltre i 360°. Ciò è possibile perché il sistema di misura è in grado di contare il numero di giri. Spesso il segnale aumenta continuamente per l'intero intervallo angolare specificato. L'encoder assoluto multigiro ETA25PM di MEGATRON, ad esempio, è in grado di misurare campi angolari fino a un massimo di 72000° (fino a 200 giri dell'albero) e questo campo può essere limitato dalla programmazione. L'impostazione di fabbrica è 3600° (10 giri). Quando si misurano angoli >360°, tuttavia, il sensore può essere ruotato al massimo di ±179° in stato di diseccitazione, altrimenti il sensore perderà il valore misurato.

Per evitare questo problema, esistono gli encoder "true power on". Essi sono in grado di fornire la posizione angolare corretta in ogni caso, anche in assenza di alimentazione. Una possibile variante consiste nell'utilizzare una riduzione ad ingranaggi in modo che l'albero ruoti più volte, ma il magnete ruoti solo per un massimo di 360° all'interno del campo di posizionamento. Per ulteriori informazioni su questo argomento, consultare la nostra Guida agli encoder multigiro.
Uscite di segnale elettrico
Per gli encoder assoluti sono disponibili uscite di segnale analogiche e digitali.
Uscite di segnale analogico per encoder assoluti:
- Tensione
- Corrente
- PWM (modulazione di larghezza di impulso)
Uscite di segnale digitale per encoder assoluti:
- SPI
- SSI
Uscita in corrente e tensione
Le uscite analogiche sono ancora molto importanti nel mercato degli encoder. Per questo motivo, la maggior parte delle serie viene offerta con queste uscite. Gli encoder assoluti MEGATRON con uscite analogiche sono sempre progettati con tecnologia a 3 fili, a meno che non offrano ridondanza. I due collegamenti per la tensione di alimentazione (VSUP) e il segnale di uscita (OUT) hanno una massa comune. Molti encoder assoluti senza contatto con uscite di segnale ridondanti sono isolati galvanicamente e offrono quindi tensioni di alimentazione, massa e uscite di segnale separate per ciascun ramo di segnale.
Rilevamento esterno della rottura del filo
Per generare un rilevamento esterno della rottura del filo tramite un'unità di valutazione, il segnale di uscita dell'encoder angolare non deve essere nullo durante il funzionamento, indipendentemente dall'angolo, poiché una tensione di uscita di 0 V o una corrente di uscita di 0 mA sono indicatori di una rottura del filo. Per tutti gli encoder assoluti MEGATRON con uscita in corrente, è possibile realizzare un rilevamento esterno della rottura del filo mediante programmazione in fabbrica, poiché l'angolo misurato viene sempre emesso in un intervallo di 4...20 mA.
Per quanto riguarda l'uscita in tensione, nel nostro programma sono presenti serie che offrono questa funzione ex fabbrica. Tuttavia, ciò non è possibile su tutti i modelli. Contattateci se non siete sicuri.

Interfaccia PWM
Con l'uscita PWM, l'angolo misurato non è proporzionale all'ampiezza del segnale ma alla larghezza dell'impulso. Il vantaggio rispetto alle uscite in corrente o in tensione è che questa forma di uscita del segnale è in gran parte insensibile alle interferenze elettromagnetiche (EMI), poiché le EMI di solito influenzano l'ampiezza del segnale piuttosto che la frequenza (ad esempio, radio AM/FM). Tuttavia, il segnale deve essere rilevato da un'unità di valutazione esterna progettata per il PWM.
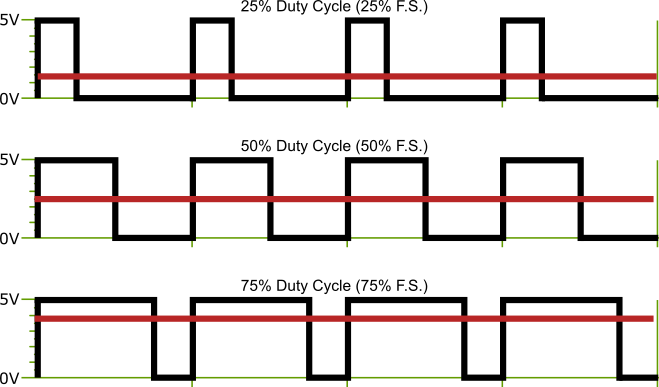
L'ampiezza dell'impulso sugli encoder MEGATRON varia tra il 10% (0% F.S.) e il 90% (100% F.S.). La frequenza portante è di 244 Hz.
Interfacce digitali
I microcontrollori spesso forniscono ingressi per segnali digitali basati sui formati SPI e SSI. Gli encoder assoluti vengono offerti con queste interfacce digitali per garantire un'elevata compatibilità con molti microcontrollori presenti sul mercato. La descrizione dettagliata delle interfacce digitali e delle loro caratteristiche specifiche esula dagli scopi del presente manuale. La spiegazione che segue è pertanto da intendersi solo come una breve panoramica.
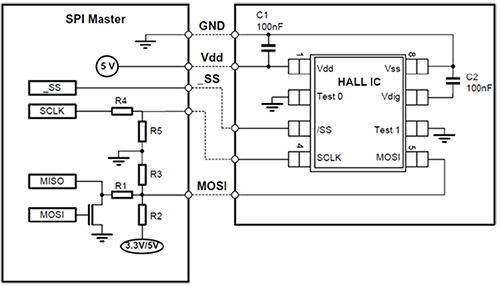
SPI (interfaccia periferica seriale)
L'interfaccia SPI si basa su un protocollo BUS seriale master/slave sviluppato da Motorola. La comunicazione avviene tramite le linee dati:
- MOSI (Master Out → Slave In)
- MISO (Master In ← Slave Out)
- SCK (Serial Clock) (= clock del bus/shift clock)
Oltre a queste tre linee, per ogni slave è necessaria una linea chiamata "Slave Select (SS)" o "Chip Select (CS)". Si noti che questo formato non è adatto alla comunicazione sul campo, poiché la lunghezza del cavo tra master e slave non deve superare 0,6 m. Per ulteriori informazioni sugli encoder magnetici MEGATRON con interfaccia SPI, contattateci.
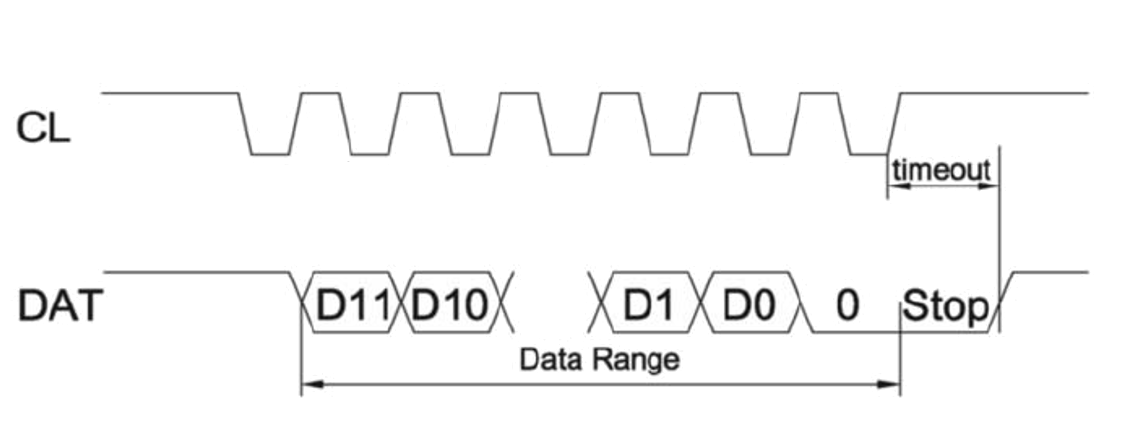
SSI (interfaccia seriale sincrona)
L'interfaccia SSI è un'interfaccia ampiamente utilizzata per la comunicazione seriale dei dati. È particolarmente adatta per la comunicazione digitale degli encoder assoluti sul campo, dove i valori misurati devono essere trasmessi su lunghe distanze tra l'encoder e l'unità di valutazione. La trasmissione dei dati (clock e dati) avviene tramite quattro linee, ciascuna delle quali trasporta due coppie di segnali (trasmissione simmetrica dei segnali in fase e a 180° in fase). Se i segnali di una coppia di segnali sono sovrapposti da un disturbo sul percorso di trasmissione tra slave e master, questo disturbo può essere rimosso dalle due coppie di segnali nell'unità di valutazione mediante sottrazione. I cavi di segnale a coppia ritorta con coppie schermate singolarmente sono particolarmente adatti per una trasmissione affidabile dei segnali di misura su lunghe distanze. Per ulteriori informazioni sulla comunicazione SSI con gli encoder MEGATRON, contattateci.
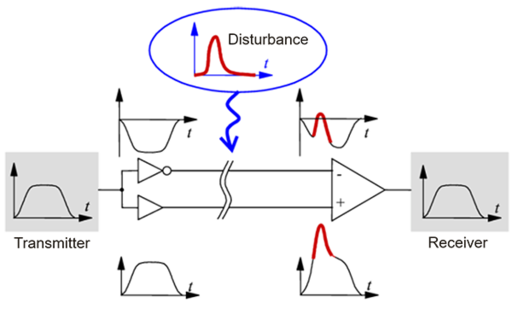
Concetto di eliminazione dei guasti mediante SSI
Trasmissione dei dati sui due canali Orologio e Dati










Gli encoder assoluti sono encoder rotativi che misurano le posizioni angolari in un'applicazione, convertono queste informazioni angolari in segnali elettrici e li emettono come valori assoluti. Le tecnologie dei sensori magnetici basate sull'effetto Hall forniscono risultati di misura eccellenti, con i noti vantaggi della misura senza contatto e della durata praticamente illimitata del sensore.
L'ampia scelta di tipi di uscita elettrica, connessioni e design meccanico fornisce dati di misura affidabili, ripetibili e precisi per quasi tutte le applicazioni. Il campo di misura angolare di un encoder assoluto è di fondamentale importanza. Gli encoder monogiro coprono campi angolari fino a 360 gradi, mentre gli encoder multigiro coprono angoli superiori. Particolarmente degna di nota è la possibilità di programmare caratteristiche di uscita personalizzate.
Prendendo in considerazione tutti i parametri possibili, elaboriamo la migliore soluzione di prodotto nell'ambito della nostra consulenza. In molti casi, le applicazioni più complesse richiedono un adattamento tecnico del prodotto. MEGATRON è il vostro specialista in questi casi e vi supporterà come partner affidabile a lungo termine, dalla richiesta iniziale alla realizzazione della produzione in serie e oltre, fino alla "fine del ciclo di vita" della vostra applicazione, con prodotti di qualità garantita e un'elevata affidabilità di consegna.