 EN
EN DE
DE ES
ES FR
FR IT
IT










Encoder da pannello
Per il controllo manuale con interfaccia incrementale
Guida encoder ottici da pannello
Indice
5 consigli per la scelta dell'encoder da pannello giusto
Nella scelta dell'encoder da pannello appropriato, l'utente deve avere ben chiari i requisiti di base che deve avere per il prodotto.
1. I requisiti aptici e meccanici sono:
- Con o senza fermo
- La coppia di azionamento
- La coppia di bloccaggio
- La forza di azionamento del pulsante
- La corsa di rilevamento
- Con fine corsa, senza fine corsa
- Il diametro dell'albero
- Il montaggio del sensore nell'applicazione
2. I requisiti elettrici principali comprendono
- La tensione di alimentazione
- Il consumo di corrente
- Il segnale di uscita, l'elettronica di uscita
- Una ridondanza elettrica
- Con pulsante [sì/no]
- Tensione/corrente massima del pulsante
3. Caratteristiche ambientali:
- La temperatura di esercizio
- Il livello di protezione IP
- Resistenza agli urti/vibrazioni
4. Durata di vita:
- Numero di azionamenti dell'albero
- Numero di azionamenti del pulsante
5. Prezzo:
- Limite superiore di prezzo del regolatore manuale
- Limite superiore di prezzo per la manopola
Che cos'è un encoder ottico manuale?
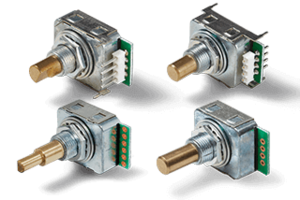
Gli encoder ottici manuali fanno parte degli encoder incrementali(vedere la guida). Tuttavia, vengono utilizzati principalmente come dispositivi di impostazione manuale. In questo caso, i setpoint vengono emessi come segnali elettrici sotto forma di incrementi mediante un movimento rotatorio manuale dell'asse dell'encoder (in senso orario o antiorario). Il nostro portafoglio comprende solo encoder con sensore optoelettronico. Possono avere caratteristiche aggiuntive come pulsanti integrati e/o i cosiddetti detentori. Se è integrato un pulsante, un contatto di commutazione viene chiuso quando viene esercitata una forza assiale sull'albero. Con l'opzione del fermo, la coppia cambia in passi equidistanti quando l'albero viene azionato.
Le applicazioni più diffuse sono:
- Modifica del volume, ad esempio nei ricevitori AV e nei sistemi audio CAR.
- Scorrimento di menu
- Specificazione di valori numerici
- Conferma di una funzione o di setpoint
Principio della scansione ottica
Gli encoder ottici incrementali forniscono il loro segnale utile sotto forma di impulsi. Per rilevare il senso di rotazione, gli encoder forniscono in uscita due segnali elettrici, quelli dei canali A e B, i cui segnali sono sfasati di 90°. Un'unità di valutazione utilizza la relazione dei segnali A e B per rilevare se l'asse dell'encoder è ruotato in senso orario o antiorario. Le tecnologie dei sensori ottici presentano diversi vantaggi. Si tratta di un principio di misura senza contatto, vale a dire che la trasmissione del valore misurato tra la registrazione del valore misurato e l'acquisizione del valore misurato avviene senza contatto. Per maggiori dettagli sugli encoder ottici incrementali, consultare la relativa guida.
Interruttore a pulsante
Molti encoder possono essere ordinati con un interruttore a pulsante integrato, che viene azionato da una forza assiale (pressione) che agisce sull'albero. Gli interruttori funzionano esclusivamente come contatti normalmente aperti (N.A.). Ciò significa che il contatto di commutazione è chiuso durante il funzionamento e aperto quando non viene azionato. La funzione di commutazione è realizzata mediante un interruttore/interruttore a scatto sotto l'albero.

Per le caratteristiche elettriche ammissibili del pulsante è necessario rispettare i seguenti criteri di selezione:
- Tensione massima ammissibile applicata al pulsante
- Corrente massima ammissibile che passa attraverso il pulsante
- Resistenza di contatto del pulsante
- Se il pulsante è dotato o meno di un riferimento di terra.
La maggior parte dei parametri varia a seconda dell'encoder, ma la tensione massima ammissibile del pulsante è di 12V/DC per tutti gli encoder MEGATRON.
Per le caratteristiche meccaniche del pulsante è necessario osservare i seguenti criteri di selezione:
- Durata (numero di attuazioni)
- Corsa [mm]
- Forza di azionamento [N]
- Tempo di rimbalzo [ms]
Il tempo di rimbalzo definisce il tempo di un interruttore elettromeccanico a scatto fino alla chiusura completa del contatto di commutazione.
Fermi

Gli encoder con detentori forniscono all'operatore un feedback aptico. Questo feedback è espresso da un'evidente variazione periodica della resistenza meccanica durante la rotazione. I detentori sono disponibili solo come opzione per questi encoder. Nella maggior parte dei casi, è possibile selezionare il numero di posizioni di fermo e la coppia di fermo. Più precisamente, per detentore si intende la variazione della coppia operativa in passi equidistanti durante la rotazione dell'albero. L'albero si blocca sempre tra due posizioni e solo applicando una forza maggiore è possibile cambiare la posizione. La posizione di fermo è chiamata "posizione di fermo". Elettricamente, si verifica un cambiamento di stato dei livelli di uscita del segnale tra due posizioni di arresto successive o durante il cambiamento della posizione di arresto. A questo scopo viene utilizzata un'unità di valutazione.
Gli impulsi possono essere utilizzati, ad esempio, per le seguenti applicazioni:
- Generalmente per l'aumento o la diminuzione di un valore numerico per ogni posizione del fermo.
- Per la navigazione in una struttura a menu mediante un movimento rotatorio - ogni posizione di fermo corrisponde a una modifica della posizione del menu.
La forza utilizzata per superare la posizione del fermo è chiamata nelle schede tecniche anche coppia di fermo. Maggiore è la coppia di arresto, maggiore è la forza da applicare per ruotare l'albero dell'encoder e quindi modificare il setpoint mantenendo il diametro della manopola di regolazione.
Lo scopo di una coppia di arresto maggiore è
- Impedire la rotazione involontaria dell'albero e quindi contrastare una variazione involontaria del setpoint.
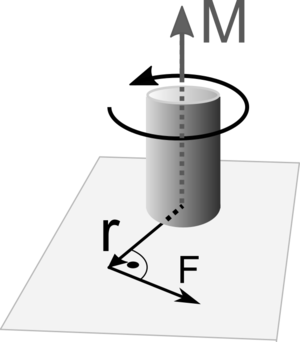
- compensare la relazione tra il diametro della manopola di regolazione e la coppia di arresto. Maggiore è il diametro della manopola di regolazione, più lunga è la leva (r), che agisce perpendicolarmente all'asse centrale dell'albero, e minore è la forza (F) necessaria per ruotare la manopola di regolazione e quindi l'asse dell'encoder a parità di coppia di ritenuta.
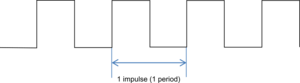
Trigger di Schmitt

Molti encoder sono dotati di un trigger Schmitt integrato. Il trigger di Schmitt è un circuito elettronico. La scheda tecnica di ogni encoder contiene uno schema (a blocchi) dell'elettronica dell'encoder. Da questo schema si può vedere se l'encoder ha un trigger di Schmitt integrato.
Con questo circuito si realizza un cambiamento di stato del segnale di uscita tra due stati di livello fisso basso/alto e viceversa. A tal fine, l'ampiezza del segnale all'ingresso del trigger di Schmitt deve variare entro un certo intervallo, il cosiddetto "livello di soglia". La regola generale è
- un trigger di Schmitt emette sempre segnali a onda quadra
- se la frequenza del segnale di ingresso cambia, cambia anche la frequenza del segnale di uscita
- le forme d'onda dei segnali di ingresso al trigger di Schmitt possono essere diverse. Affinché si verifichi una variazione di livello all'uscita del segnale del trigger di Schmitt, l'ampiezza del segnale di ingresso deve variare nell'intervallo delle soglie di commutazione
L'uso del circuito di trigger Schmitt presenta i seguenti vantaggi:
- Gli incrementi vengono trasmessi all'uscita del segnale come segnali a onda quadra chiaramente definiti e visualizzati senza smussare i bordi del segnale.
- Il tempo di salita e discesa tra gli stati di livello (alto/basso) è notevolmente ridotto.
- Le caratteristiche di invecchiamento dei diodi luminosi in funzionamento continuo contribuiscono a una diminuzione dell'intensità luminosa durante il periodo di funzionamento, oppure l'invecchiamento del sistema ottico stesso porta a una riduzione del livello del segnale all'uscita dei fototransistor dell'encoder rotativo e quindi anche a una modifica delle caratteristiche di commutazione. Il trigger di Schmitt viene utilizzato anche per compensare efficacemente questi effetti di invecchiamento.
Uno svantaggio degli encoder con trigger Schmitt integrato può essere il consumo di energia leggermente superiore. Questo effetto di accompagnamento negativo è spesso compensato dall'uso di semiconduttori basati su CMOS nell'encoder, che hanno un consumo energetico complessivo ridotto.
Meccanismo di blocco
In genere esistono tre metodi sul mercato per realizzare un fermo mediante un meccanismo:
- Acciaio per molle
- Sfera metallica + molla a spirale
- Ruota magnetica
Un buon meccanismo di ritenuta è caratterizzato da proprietà di ritenuta sostanzialmente invariate per l'intera durata di vita dell'encoder. Come elemento di comando manuale, ad esempio, ciò significa
Se per un encoder viene indicata una durata di vita di 1 milione di giri dell'albero e se il setpoint venisse modificato 80 volte al giorno mediante azionamento manuale, la soglia di 1 milione di azionamenti verrebbe superata solo dopo oltre 34 anni. 80 cambi di stato manuali al giorno, per 365 giorni all'anno, sono già troppo alti per la maggior parte delle applicazioni. Le indagini hanno dimostrato che gli encoder rotativi vengono azionati in media molto meno di 100.000 volte durante la loro vita. In realtà, solo poche decine di migliaia di attuazioni durante la vita di un'applicazione sono realistiche.
Acciaio per molle
Nei meccanismi di ritenuta in acciaio per molle, una piastra elastica si inserisce nelle cavità dell'alloggiamento, la cui superficie di scorrimento è spesso ingrassata. Questi meccanismi di ritenuta mostrano spesso un comportamento di ritenuta fortemente decrescente in funzione dell'azionamento dell'albero e si trovano soprattutto negli encoder con una durata di vita limitata.
Sfera metallica e molla a spirale
Il meccanismo di chiusura è realizzato da due sfere metalliche, disposte di fronte all'albero all'interno. Le sfere sono spinte da due molle a spirale su una corona dentata montata sull'albero. Ai denti della corona dentata viene applicato un lubrificante. Questo principio è stato notevolmente sviluppato e continuamente migliorato da noi. Offre proprietà ottimali in termini di design compatto, durata del prodotto ed elevata efficienza.
Ruota polare magnetica
Un meccanismo di chiusura con ruota polare magnetica è una soluzione tecnicamente di alta qualità che offre la massima durata del prodotto con un comportamento di chiusura costante.
Un magnete permanente circolare (ruota polare) è montato su un albero encoder, che viene magnetizzato alternativamente a intervalli equidistanti (nord/sud). Nell'alloggiamento dell'encoder, attorno al magnete permanente sono disposte piccole piastre metalliche magnetiche circolari a distanze uguali l'una dall'altra. Quando l'albero ruota, anche la ruota dei poli si muove e si verificano effetti magnetici reciproci tra la ruota dei poli e le piastre metalliche. Tra i campi magnetici alternati della ruota polare e delle piastre metalliche nell'alloggiamento dell'encoder agiscono una forza di repulsione (nord/nord o sud/sud) e una forza di attrazione (nord/sud). Se non c'è rotazione dell'albero, l'albero rimane in una posizione, il che equivale a un inserimento a scatto. Il principio della ruota dei poli richiede molto più spazio rispetto ad altri metodi ed è più complesso e costoso da produrre.
Inibizione della rotazione (aumento della coppia operativa)
Gli encoder sono spesso utilizzati come regolatori manuali. Pertanto, sono ottimizzati per l'azionamento manuale dell'albero.
Per un'immissione sicura dei setpoint è necessaria una coppia di funzionamento più elevata. Questo è l'unico modo per impostare setpoint precisi e contrastare la rotazione involontaria dell'albero.
La coppia descrive l'effetto rotatorio di una forza che deve agire sull'albero per farlo ruotare. L'unità di misura della coppia è il Newton metro [Nm]. Per aumentare la coppia, si utilizzano encoder rotativi con cuscinetti a strisciamento e l'antirotazione è ottenuta mediante un grasso smorzante e/o un elemento a molla per generare un attrito aggiuntivo. L'uso di un cuscinetto a sfere non ha senso a causa della bassa coppia (di distacco).
La coppia deve essere specificata tenendo conto della temperatura di esercizio e del numero di movimenti dell'albero. Più bassa è la temperatura di esercizio, più alta è la coppia di esercizio. Anche un arresto prolungato dell'albero e la velocità di conferma (rpm) hanno un'influenza. Spesso la coppia è specificata in una scheda tecnica a temperatura ambiente e a una velocità di azionamento costante di 10 giri/min.
Per ragioni tecniche non è possibile rappresentare la specifica con un unico valore. Questo è possibile solo per un intervallo di valori. I motivi sono principalmente le tolleranze del cuscinetto dell'albero e dell'albero, nonché la quantità e il posizionamento del grasso smorzante sull'albero e sul cuscinetto dell'albero. Le informazioni tipiche sulla coppia di funzionamento riportate nelle schede tecniche sono
0,1 ≤ M ≤ 0,6 Ncm / 0,3 ≤ M ≤ 1,3 Ncm (@RT, 10 rpm)
L'abbreviazione RT indica il riferimento della misurazione della coppia alla temperatura ambiente, che è compresa tra 19 °C e 21 °C secondo lo standard per edifici residenziali e uffici.
Argomento manopola

Oltre alle caratteristiche come la coppia di funzionamento o la coppia di arresto, la manopola svolge un ruolo decisivo nelle proprietà aptiche di un encoder rotativo. La massa e il diametro esterno sono i fattori più importanti.
I volantini hanno solitamente una testa di regolazione con una massa elevata. Se si esegue un movimento rotatorio veloce e si rilascia la testina di regolazione, la massa relativamente elevata della manopola impedisce all'albero dell'encoder di arrestarsi bruscamente. Ciò significa che: La massa maggiore della manopola porta a un movimento rotatorio brevemente continuo dell'albero (caratteristica di sovraelongazione dovuta all'inerzia della massa). Ciò può essere vantaggioso per i setpoint che devono essere modificati rapidamente, perché questo effetto supporta la rotazione.
Con gli encoder rotativi di MEGATRON nella versione a volantino, nella manopola è integrata anche una manovella. Nel caso dei volantini, la manopola fa parte della fornitura ed è già fissata all'encoder rotativo. Per tutti gli altri encoder rotativi, la manopola deve essere selezionata come ulteriore accessorio.


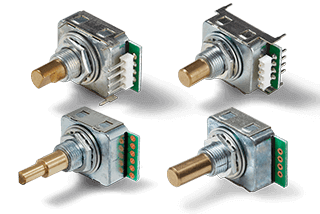



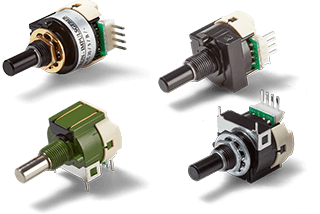
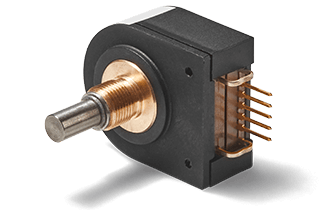



Gli encoder da pannello con tecnologia optoelettronica sono encoder ottici incrementali e forniscono i loro valori di uscita sotto forma di impulsi. Sono spesso utilizzati come interfaccia uomo-macchina per la specificazione precisa dei setpoint. Per un uso pratico, gli elementi di comando offrono spesso fermi aggiuntivi e la funzione di pulsante. Poiché vengono azionati manualmente, la configurazione del prodotto ha una grande influenza sulla sensazione di funzionamento.
Questi includono, tra l'altro, un'inibizione della rotazione, un interruttore a pulsante e dei fermi adattati ai requisiti dell'applicazione. L'inibizione della rotazione, ad esempio, impedisce la regolazione involontaria e, in combinazione con i fermi, determina le proprietà tattili. Con il nostro portafoglio copriamo un'ampia gamma di esigenze. Inoltre, siamo il vostro partner per l'ottimizzazione dell'encoder da pannello nella vostra applicazione.
In fin dei conti, sono i requisiti dell'applicazione a dettare il tipo di funzionamento. Saremo lieti di consigliarvi e di definire insieme a voi il prodotto ottimale per il vostro "design in". Il nostro obiettivo è fornire il miglior prodotto funzionale ed economico per la vostra applicazione. In questo modo, vi accompagniamo come partner di lunga data con un'elevata affidabilità di consegna e prodotti di qualità garantita per l'intera durata della vostra applicazione.