 EN
EN DE
DE ES
ES FR
FR IT
IT










Encoder incrementali
Encoder ottici e magnetici con uscita incrementale
Guida Encoder incrementali
Indice
Che cos'è un encoder incrementale?
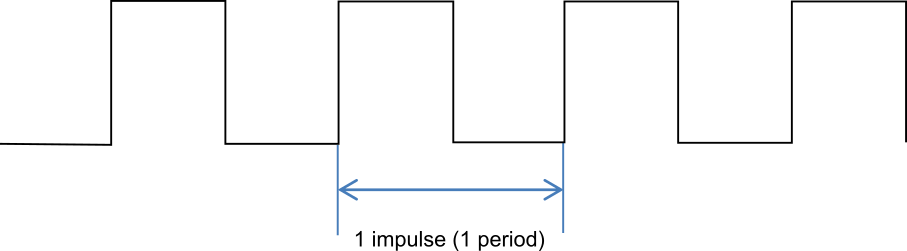
Gli encoder incrementali sono encoder rotativi che forniscono un segnale di uscita sotto forma di impulsi. Un impulso corrisponde a un periodo, l'incremento, da cui questo tipo di encoder prende il nome. Gli encoder incrementali sono chiamati anche encoder a impulsi rotativi per le loro caratteristiche di encoder per il movimento rotatorio e per la forma del loro segnale. L'uso di impulsi per la misurazione è un principio fondamentalmente diverso da quello dei potenziometri e degli encoder assoluti.
La proprietà più importante per determinare l'accuratezza angolare di un encoder incrementale è il numero di impulsi generati per ogni giro completo dell'albero in uscita (impulsi per giro, ppr.). Questo valore è riportato su qualsiasi scheda tecnica di encoder incrementale.

Per valutare i segnali degli encoder incrementali è sempre necessaria un'unità di valutazione esterna, come un contatore.
- Se si vuole registrare l'angolo, il numero di impulsi deve essere contato da un'unità di valutazione. Se l'angolo deve essere registrato, le informazioni degli incrementi devono essere valutate. Ad esempio, se l'encoder incrementale fornisce 360 ppr, 1° corrisponde esattamente a un impulso.
- Per la misura della velocità angolare (variazione dell'angolo per unità di tempo), si calcola il numero di impulsi per unità di tempo.
In generale, ci sono alcuni aspetti da considerare quando si valutano i segnali, vedi Valutazione dei segnali incrementali.
Principi operativi
Esistono diversi principi di sensori che possono essere utilizzati per implementare gli encoder incrementali. Il più comune è probabilmente il rilevamento optoelettronico, utilizzato negli encoder ottici. Un'altra possibilità è il rilevamento magnetico. Anche gli encoder Hall sono disponibili con uscite incrementali. MEGATRON utilizza solo moderni sensori di Hall a gradiente.
Encoder ottici incrementali
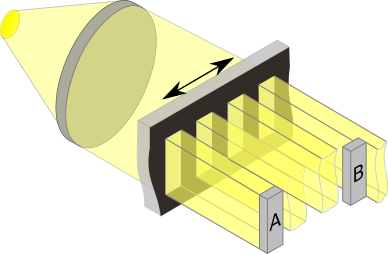
La figura mostra un'illustrazione semplificata del principio di misurazione delle immagini di un codificatore ottico. I due rilevatori A e B sono illuminati con uno sfasamento spaziale durante la rotazione della ruota di codifica (nera), generando impulsi.
La tecnologia dei sensori ottici presenta diversi vantaggi che rendono gli encoder ottici i più importanti encoder incrementali. In primo luogo, il fatto che il metodo di misurazione degli elementi del sensore integrato genera esso stesso incrementi, e quindi l'uso negli encoder incrementali è ovvio. Una panoramica degli encoder ottici è disponibile qui.
Il sistema ottico di un moderno encoder incrementale ottico è costituito almeno dai seguenti componenti:
- Un diodo a emissione luminosa (LED) che produce la luce.
- un collimatore che dirige la luce del LED in parallelo
- Una ruota di codifica che alterna regioni permeabili e non permeabili (o riflettenti e assorbenti).
- Il fotorivelatore, che rileva la luce incidente dal LED e la converte in un segnale elettrico.
Sul mercato si sono affermati due metodi: Il metodo trasmissivo (imaging) e il metodo riflessivo (interferenziale). Nel metodo trasmissivo, la ruota di codifica viene transilluminata, mentre nel metodo riflessivo il fascio di luce viene riflesso dalla superficie della ruota di codifica e vengono utilizzati effetti di interferenza.
Breve spiegazione del metodo trasmissivo:
La luce viene collimata (parallelizzata) e fatta passare attraverso la ruota di codifica. La ruota assicura che le aree chiare e scure sui rilevatori si alternino periodicamente. Il segnale dei due fotorivelatori è normalmente sfasato di 90°. Di conseguenza, il senso di rotazione può essere determinato dalla sequenza dei segnali o dalla loro distanza nel segnale di uscita.
La struttura varia a seconda dei requisiti. Ad esempio, elementi aggiuntivi nella progettazione del sensore generano un impulso di riferimento che genera un segnale su un terzo canale solo una volta per giro. Questo riferimento consente di calcolare l'angolo assoluto. Ciò significa che il numero di impulsi viene contato a partire dal riferimento. Se il conteggio viene perso a causa di un'interruzione dell'alimentazione, l'angolo di riferimento può essere utilizzato per recuperare le informazioni sull'angolo assoluto.
Ruote di codifica per encoder ottici
Le ruote di codifica sono realizzate in diversi materiali, solitamente metallo, vetro o plastica. La plastica è utilizzata principalmente per gli encoder a basso costo. Le ruote di codifica in metallo sono molto robuste. Se si confronta il metallo con il vetro o la plastica, non è possibile ottenere risoluzioni ottiche così elevate a parità di diametro con il metodo trasmissivo. Con il metodo a riflessione, la struttura incrementale viene stampata sulla ruota di codifica ed è possibile ottenere strutture più fini.
Encoder incrementali a effetto Hall
Gli encoder di Hall sono disponibili anche con uscite incrementali. Come nel caso degli encoder ottici, la tecnologia di misura è priva di contatto e quindi praticamente esenta da usura (a parte il cuscinetto). I principali vantaggi degli encoder incrementali a effetto Hall sono la durata praticamente illimitata della tecnologia del sensore (nessun invecchiamento dei LED) e l'eccellente resistenza agli urti. Gli svantaggi possono essere la sensibilità alle interferenze esterne e il fatto che i segnali vengono trasmessi con un leggero ritardo (frequenza di aggiornamento). Per una spiegazione del principio di misura degli encoder a effetto Hall, consultare la guida agli encoder assoluti. Per un'analisi più dettagliata dei vantaggi e degli svantaggi delle diverse tecnologie di encoder, consultare la guida agli encoder rotativi.
Valutazione dei segnali incrementali
Canali, risoluzione e senso di rotazione
Gli encoder incrementali hanno solitamente diverse uscite di segnale. Se un encoder incrementale emette diversi pacchetti di segnali, in questo contesto si utilizza il termine canale. Ad esempio, "Canale A" e "Canale B". In letteratura, al posto di "canale" si usa anche il termine "traccia".
Esempio:
Se la scheda tecnica di un encoder incrementale specifica il valore 360 ppr e l'encoder ha le uscite di segnale elettrico "A" e "B" ("Canale A" e "Canale B"), allora 360 impulsi per una rivoluzione dell'albero (per 360°) vengono emessi all'uscita "A" e altri 360 ppr 90° avanti o dietro gli impulsi del canale A vengono emessi all'uscita "B". In totale, l'encoder genera 720 ppr per giro completo dell'albero (360°) per entrambi i canali A e B.
Il numero di impulsi per giro (ppr) è anche indicato come risoluzione; maggiore è il valore ppr), maggiore è la risoluzione angolare dell'encoder.
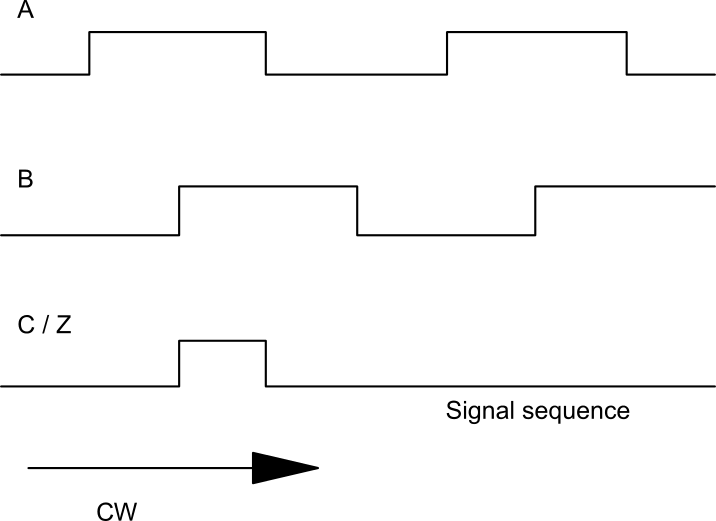
I segnali a onda quadra del "Canale B" si trovano o 90° avanti o 90° indietro rispetto ai segnali del "Canale A". Il fatto che il segnale del "Canale A" sia 90° avanti o 90° indietro rispetto al segnale del "Canale B" dipende dal prodotto ed è specificato nella scheda tecnica. Nella maggior parte dei casi, insieme all'indicazione del senso di rotazione, è presente un'illustrazione della funzione di uscita del segnale che mostra la sequenza dei segnali dei canali.
Esempio:
Nell'illustrazione a destra, il senso di rotazione è definito CW (orario). Quando l'encoder è visto frontalmente (con l'estremità dell'albero dell'encoder rivolta verso l'osservatore) e l'albero dell'encoder è ruotato in senso orario, l'uscita del segnale del "Canale B" è ritardata di 90° rispetto all'uscita del "Canale A". Se invece l'albero viene ruotato in senso antiorario, il segnale del "Canale B" sarà in anticipo di 90° rispetto al segnale del "Canale A".
Questa relazione può essere utilizzata in un'unità di valutazione per rilevare il senso di rotazione. Il numero di impulsi, la lunghezza degli impulsi e il periodo della traccia A e della traccia B sono identici. Quando si sostituisce un encoder con un altro modello, queste caratteristiche sono decisive, poiché non è necessario modificare la programmazione dell'unità di valutazione se le sequenze di segnali dei prodotti da scambiare sono identiche.
Binario Z / Segnale indice
Spesso è possibile selezionare una traccia aggiuntiva come opzione, la cosiddetta traccia indice o "traccia Z". L'uscita della traccia Z fornisce un segnale di indice sotto forma di un singolo impulso quadrato per ogni giro completo dell'albero (360°).
Il segnale di indice ha due funzioni principali:
- Come riferimento di zero: Dopo un periodo di assenza di tensione, l'impulso di indice può essere utilizzato per spostarsi verso un punto zero definito.
- Come impulso di riferimento: in particolare per gli encoder che operano a velocità molto elevate, l'impulso di riferimento ha una funzione di controllo come impulso di conteggio separato per una corsa/giro completo.
Caso di studio:
Si controlla se il numero di impulsi di conteggio "normali" tra due impulsi di indice consecutivi corrisponde al numero previsto. Ad esempio, se si utilizza un encoder con specifiche di 16000 impulsi/giro e l'unità di valutazione conta meno di 16000 impulsi per giro completo, si è verificato un errore.
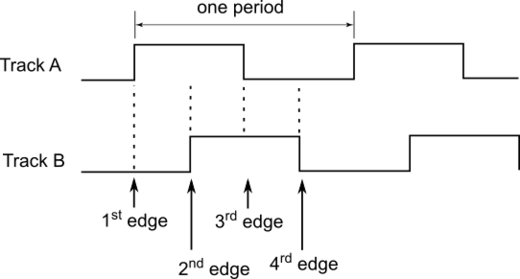
Valutazione dei bordi / segnale di quadratura
L'offset di 90° dei segnali a onda quadra dei canali A e B presenta un vantaggio. Per ogni traccia e periodo del segnale, un segnale a onda quadra presenta un fronte di salita e uno di discesa.
La sequenza dei bordi per le tracce A e B di un periodo del segnale è la seguente:
Bordo ascendente della traccia A (1) → dopo un periodo di ¼ Bordo ascendente della traccia B (2) → dopo un periodo di ½ Bordo discendente della traccia A (3) → dopo un periodo di ¾ Bordo discendente della traccia B (4)
Se un'unità di valutazione valuta non solo il fronte di salita di una traccia, ma anche i fronti di salita e di discesa di entrambe le tracce A e B, il numero di impulsi può essere quadruplicato con questo metodo. Ciò equivale a quadruplicare l'accuratezza senza alcuna modifica strutturale dell'encoder.
Esempio:
Se la scheda tecnica dell'encoder incrementale indica una risoluzione di 1024 ppr, con la valutazione dei bordi questa sarà quattro volte superiore, ossia 4096 segnali per giro per canale. La valutazione dei bordi appena descritta è chiamata anche "segnale di quadratura con informazioni direzionali". La valutazione dei bordi può essere basata, ad esempio, sul circuito integrato LS7083 offerto da MEGATRON.
Velocità massima e frequenza di taglio
Gli encoder incrementali non possono funzionare a qualsiasi velocità. Esistono limitazioni meccaniche e/o elettroniche.
Le limitazioni meccaniche possono essere determinate dalla scheda tecnica e sono dovute alle seguenti cause:
- Velocità massima del cuscinetto dell'albero (si applica solo agli encoder con cuscinetto proprio, vedere Encoder ad albero). La velocità massima consentita è spesso inferiore a 10000 giri/min.
- L'eccentricità (sbilanciamento) della meccanica. Negli encoder ottici, ciò è dovuto principalmente allo sbilanciamento della ruota di codifica. Tuttavia, la velocità massima di funzionamento può raggiungere i 60.000 giri/min. Gli encoder a kit magnetico, invece, non presentano normalmente questa limitazione.
La limitazione elettronica può essere calcolata: in questo caso il risultato del calcolo è chiamato "velocità di azionamento massima teorica possibile".
- Il motivo è la frequenza di taglio dell'elettronica. L'elettronica non può elaborare una frequenza superiore alla frequenza di taglio. Più alta è la frequenza di taglio e più bassa è la risoluzione dell'encoder, più alta è la velocità di azionamento teoricamente possibile.
Per calcolare la velocità di azionamento massima teorica in base alla frequenza di taglio, è possibile utilizzare la seguente formula:
\(max. rpm =\frac{\text {frequenza di taglio} \frac {1} {s} * 60 }{ \text {numero di impulsi}})

Di seguito sono riportati due esempi di come calcolare la velocità massima teorica di attuazione.
Esempio 1:
È richiesta una risoluzione di 512 ppr. La frequenza di taglio è indicata come 100 kHz nella scheda tecnica dell'encoder. Si ottiene
\({100000 \cdot 1/s\cdot 60 \text{ s} \over 512} = 11718 \text { rpm} \)
Risultato: La velocità di azionamento massima teorica consentita è di 11718 giri/min.
Esempio 2:
La risoluzione richiesta è di 10000 ppr. La frequenza di taglio è specificata come 100 kHz nella scheda tecnica dell'encoder. Risultato: La velocità massima teorica dell'attuatore è di 600 giri/min.
\({100000 \cdot 1/s \cdot 60 \text{ s} \over 10000} = 600 \text { rpm} \)
Un confronto tra la velocità di attuazione massima teorica e quella meccanicamente ammissibile mostra quale sia quella che conta per l'applicazione: il più basso dei due valori è rilevante!
Tolleranze e scostamenti degli encoder ottici incrementali
Nessun encoder incrementale fornisce un segnale perfetto. Per gli encoder ottici incrementali, di seguito vengono descritte le incertezze o le tolleranze che devono essere considerate per i segnali di questi encoder. Il sistema ottico comprende la ruota dell'encoder stesso e il modulo o gruppo dell'encoder contenente il LED e il fotorilevatore. Tutti questi elementi interagiscono per produrre una certa deviazione dalla forma rettangolare ideale del segnale e dalla posizione ideale del bordo. Queste tolleranze sono spesso descritte nella scheda tecnica di un encoder ottico incrementale e aiutano l'utente ad analizzare i dati di misura con maggiore precisione.
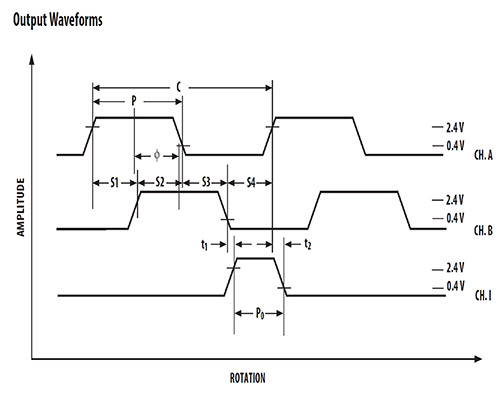
Nella maggior parte dei casi, i segnali dei canali A, B e, se necessario, Z sono rappresentati sotto forma di immagine. Le relazioni sono poi spiegate con esempi nel diagramma a fianco.
I simboli hanno il seguente significato:
C corrisponde a un periodo
P sta per ½ periodo del segnale
S per ¼ di periodo del segnale
Ф è il riferimento di fase tra i canali A e B
Nel caso ideale: C = 2 * P = 4 * S = S1 + S2 + S3 + S4.
Esempio di descrizione del campo di tolleranza della durata di un quarto di periodo
Un incremento, e quindi un periodo, è idealmente costituito da quattro componenti del segnale equidistanti (C/4). Poiché nella pratica un periodo del segnale non è diviso in quattro parti uguali, viene descritto il possibile rapporto e quindi la banda di tolleranza delle quattro parti di un periodo del segnale (T) tra loro. Il termine seguente descrive che un quarto del periodo del segnale può variare di un dodicesimo del periodo del segnale:
\(S1,S2,S3,S4 = \frac {C} {4} \pm \frac {C} {12})
Esempio di descrizione di un campo di tolleranza di mezzo periodo
Un incremento, e quindi un periodo del segnale, è idealmente costituito da due componenti del segnale equidistanti (C/2). Poiché un periodo del segnale non è sempre costituito esattamente da due coppie di onde di uguale lunghezza, viene descritto il possibile rapporto tra le due coppie di onde di un periodo del segnale (T). Il termine seguente descrive che metà periodo o metà periodo del segnale o metà lunghezza d'onda possono variare di più/meno un dodicesimo dell'ideale.
\(P = \frac {C} {2} \pm \frac {C} {12}})
Descrizione del possibile sfasamento tra i canali A e B
Idealmente, lo sfasamento tra i canali A e B è esattamente di 90° (novanta gradi). I 90° sono indicati dalla relazione C/4. Quindi un quarto di periodo del segnale corrisponde a 90°. L'errore in questo caso può essere ± C/24, cioè più-meno un ventiquattresimo. Un ventiquattresimo corrisponde a 360°/24, che corrisponde a un possibile errore di fase di più-meno 15°. Pertanto, il rapporto degli incrementi tra i canali A e B può essere compreso in un intervallo di 90° ±15° e il riferimento di fase tra i canali A e B può essere compreso in un intervallo di 75°...105°.
\(Ф = \frac {C} {4} \pm \frac {C} {24})
Descrizione della banda di tolleranza della lunghezza dell'impulso di indice (canale Z)
L'impulso di indice viene emesso una volta ogni 360° quando l'albero viene azionato in modo continuo in una direzione. Un periodo corrisponde a C. La rappresentazione C/4 significa che l'impulso di indice è idealmente lungo ¼ di un periodo del segnale. La larghezza dell'impulso dell'indice può discostarsi dall'ideale, cioè dalla lunghezza di un quarto di periodo del segnale (=C/4), di più/meno un dodicesimo di periodo del segnale.
Ciò significa che la larghezza dell'impulso dell'indice può variare tra 1/3 (=C/3) e 1/6 (=C/6) di un periodo del segnale.
\(Po = \frac {C} {4} \pm \frac {C} {12}})
Interpolazione seno/coseno
Maggiore è il numero di impulsi per giro realizzati da un encoder ottico, minore è la larghezza della linea degli incrementi sulla ruota di codifica. Tuttavia, il sistema ottico di un encoder angolare può rilevare incrementi solo fino a una certa larghezza di linea. Ad esempio, una ruota di codifica di 10 mm di diametro non può avere 10.000 linee a causa delle sue dimensioni ridotte. Quando è necessario implementare encoder incrementali con un diametro ridotto dell'alloggiamento e un'elevata risoluzione, spesso si ricorre all'interpolazione seno/coseno.
In questo metodo, il sistema ottico dell'encoder non viene utilizzato come in un encoder ottico incrementale convenzionale, per cui si verificano bruschi cambiamenti di stato tra la trasmissione e l'interruzione della trasmissione, o la riflessione e l'interruzione della riflessione. Al contrario, la transizione tra la trasmissione e la riflessione massima è il più possibile uniforme. La transizione regolare si traduce in una funzione sinusoidale del segnale. Per produrre un segnale coseno sono necessari un secondo LED e un fototransistor. I segnali seno e coseno vengono poi digitalizzati. Di solito si utilizza una frequenza di campionamento continua.
Esempio:
Se si utilizza una ruota di codifica da cui si ottengono 8 periodi sinusoidali, ciò corrisponde a una risoluzione di 3 bit. Tuttavia, se questo segnale sinusoidale viene campionato con 10 bit, la risoluzione (di digitalizzazione) è di213 bit, che equivale a una risoluzione di 8192 ppr. Il vantaggio del principio è quindi evidente.
Sono disponibili anche encoder ottici e magnetici con uscita analogica, che forniscono segnali analogici sinusoidali e cosenoidali. Con questo tipo di encoder è possibile effettuare un'interpolazione successiva.
Interfacce di uscita
Le caratteristiche dei segnali incrementali (high-low, on-off, logica booleana) li rendono particolarmente adatti all'uso nei circuiti digitali. Molte serie di encoder incrementali offrono quindi interfacce che consentono una facile integrazione in tali reti di circuiti:
- OC (collettore aperto)
- Uscita di tensione standard o TTL (logica a transistor)
- PP (Push Pull)
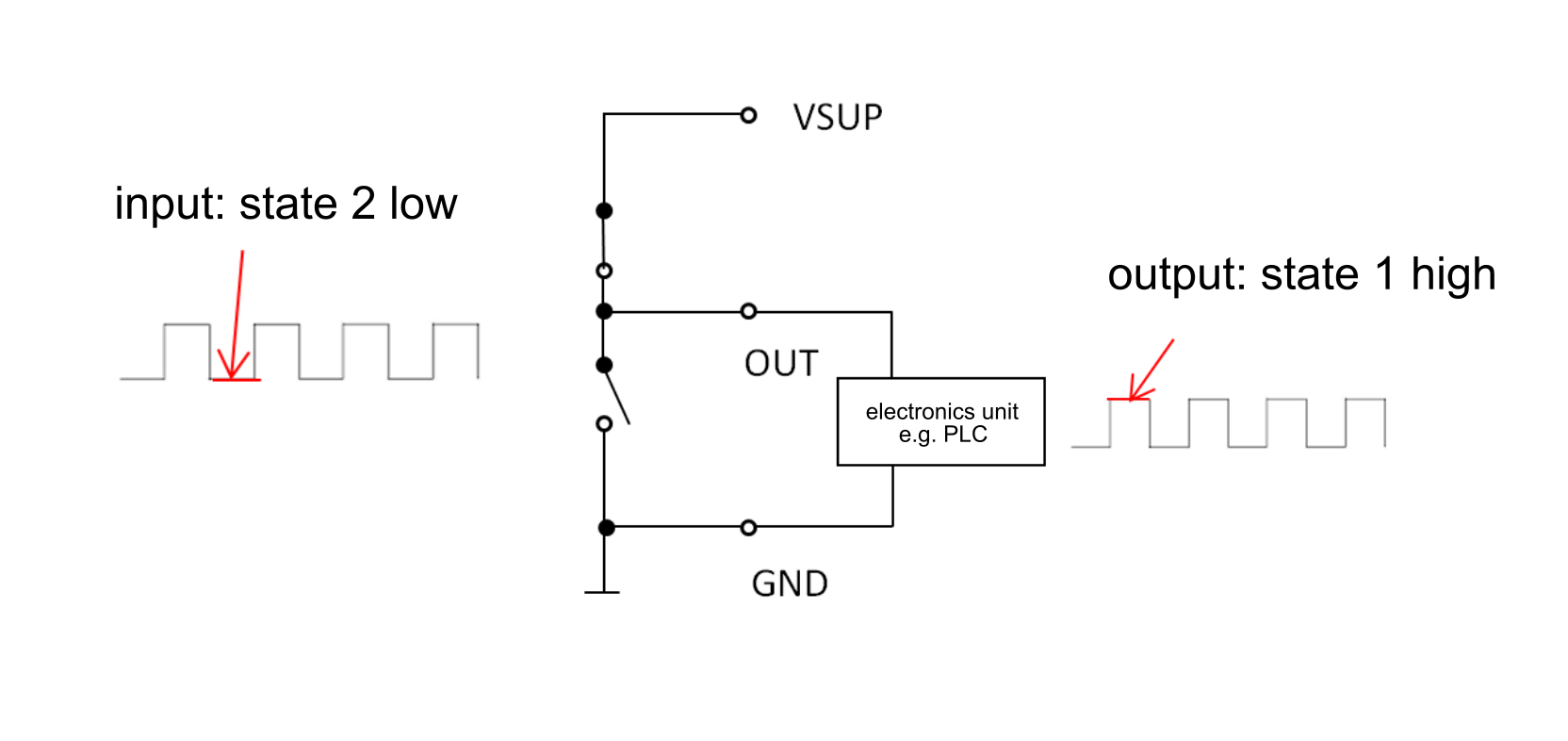
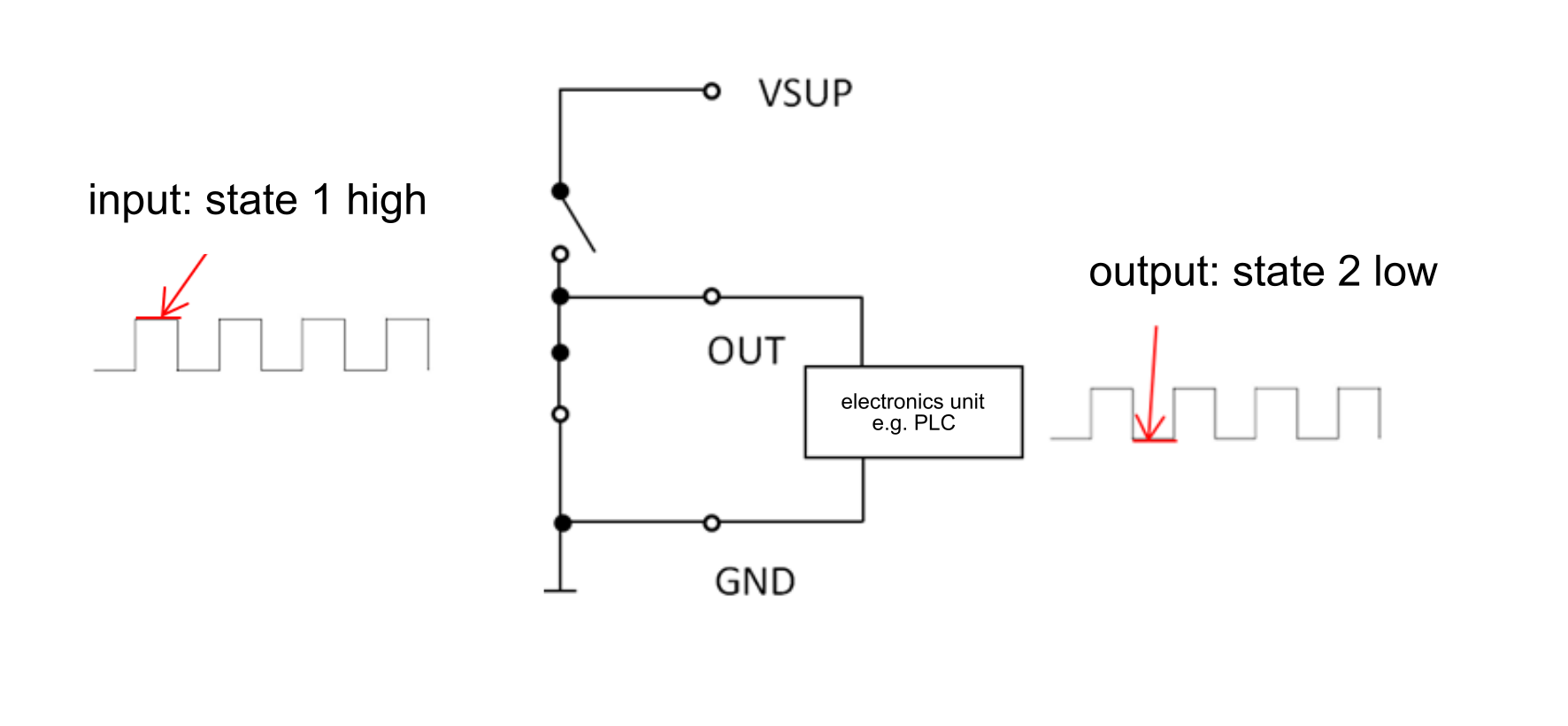
Uscita a collettore aperto (OC)
Il circuito a collettore aperto è uno standard ovvio per i circuiti di uscita dei segnali incrementali, con il vantaggio di poter collegare l'uscita a un livello di tensione diverso definito dall'applicazione. Ciò è possibile perché non vi è alcuna resistenza di pull-up integrata nell'encoder e il collettore è condotto fuori dall'alloggiamento (collettore aperto). Il transistor agisce quindi come un interruttore.
Il seguente esempio si riferisce a un transistor bipolare Si-NPN:
Livello alto all'uscita del segnale:
- Un livello basso (<0,7 V) alla base del transistor blocca il transistor e la tensione di alimentazione (VSUP) viene applicata al collettore.
Livello basso all'uscita del segnale:
- Quando la base del transistor è alta (>0,7V), la tensione sul collettore (VSUP) viene portata a massa.
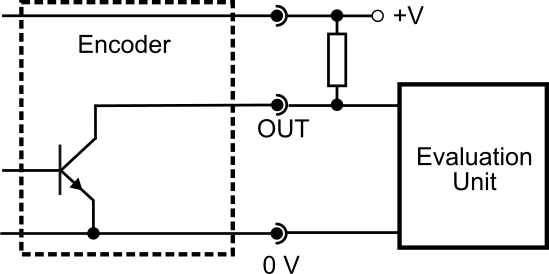
Con il circuito a collettore aperto è solitamente necessario collegare una resistenza di pull-up tra la tensione di alimentazione e le uscite di segnale A, B e Z dell'encoder (collettore). In questo modo si garantisce che i livelli possano essere rilevati dall'unità di valutazione come livelli bassi e alti. Un valore tipico per una resistenza di pull-up può essere di 4,7 kOhm. La tensione massima del collettore dipende dal transistor utilizzato e di solito è specificata nel datasheet dell'encoder. Poiché supera i 50 V, i segnali incrementali con livelli di segnale molto elevati possono essere trasmessi su lunghe distanze. A causa della variabilità della tensione di collettore, è possibile anche la conversione di livello.
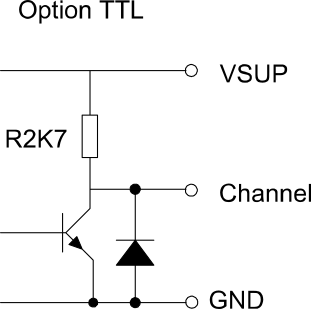
Uscita TTL
L'uscita TTL viene spesso chiamata semplicemente uscita di tensione. La differenza rispetto all'uscita a collettore aperto è che le necessarie resistenze di pull-up sono già integrate nell'alloggiamento dell'encoder, quindi i livelli sono fissi. Non è quindi possibile una conversione di livello variabile come nel caso del circuito a collettore aperto.
Questi livelli sono per la logica TTL standard:
< 0,4 V per il livello basso
> 2,4 V per il livello alto
Uscita Push / Pull
Il circuito di uscita push/pull si basa su una coppia di transistor complementari (canale n e canale p). Blocca alternativamente uno dei due transistor.
Quando il segnale di uscita è alto, si trova al livello di VSUP e quando è basso, è approssimativamente a massa. Il vantaggio di un circuito push-pull è che non sono necessarie resistenze di pull-up o pull-down aggiuntive. Se non è necessaria una conversione di livello, gli encoder con circuito di uscita push-pull possono essere utilizzati come sostituto universale delle uscite a collettore aperto e TTL/tensione.
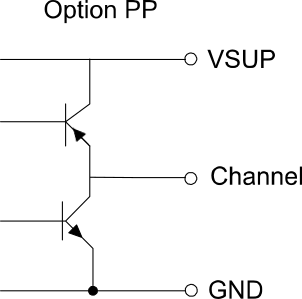
Livello basso agli ingressi dei transistor: NPN si disattiva e PNP si apre
Il livello alto è VSUP
Livello alto agli ingressi dei transistor: NPN apre e PNP disattiva
Livello basso circa a terra























Gli encoder incrementali vengono utilizzati quando è necessario misurare angoli, velocità o angolazioni con un'elevata accuratezza. Gli encoder incrementali forniscono segnali di uscita sotto forma di impulsi, che vengono contati da un'unità di valutazione esterna. I sensori dei prodotti di alta qualità utilizzati da MEGATRON si basano su principi di misurazione senza contatto, come la tecnologia dei sensori optoelettronici e magnetici (effetto Hall).
Gli encoder ottici incrementali sono insensibili alle interferenze esterne e offrono la massima precisione per le operazioni di posizionamento o regolazione. Gli encoder magnetici sono estremamente durevoli e altamente resistenti alle vibrazioni. Grazie all'ampia gamma di design e opzioni di uscita disponibili, esiste un encoder incrementale adatto a quasi tutte le applicazioni.
Tuttavia, le applicazioni speciali spesso richiedono adattamenti tecnici, che noi di MEGATRON possiamo realizzare anche per quantità relativamente piccole. Il nostro obiettivo è offrire a ogni cliente il prodotto più funzionale ed economico per la sua applicazione. In qualità di partner affidabile, vi supportiamo dalla fase di richiesta fino all'inizio della produzione in serie e fino alla fine del ciclo di vita del prodotto con un'elevata affidabilità di consegna e garanzia di qualità.